 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Placement Planning and Optimization for Robot Manipulators
Jul 04, 2019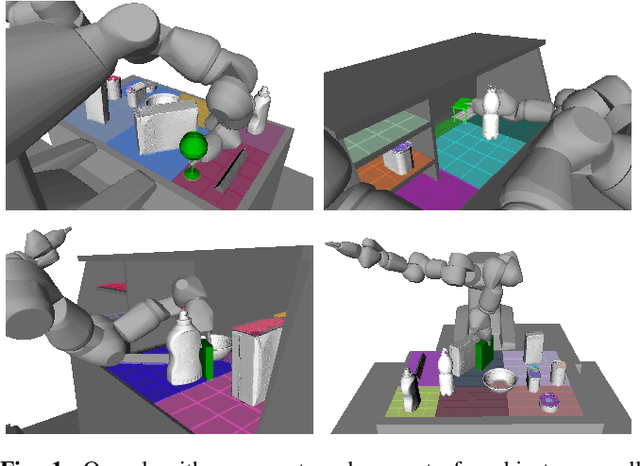
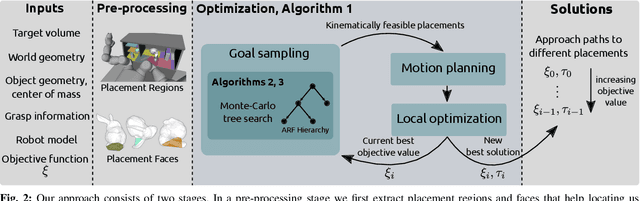
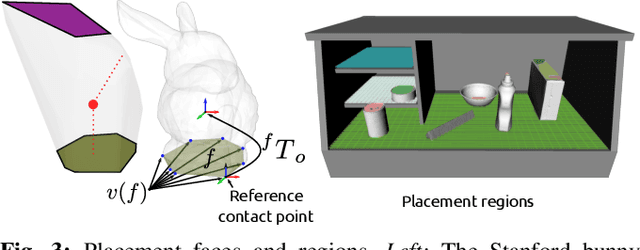
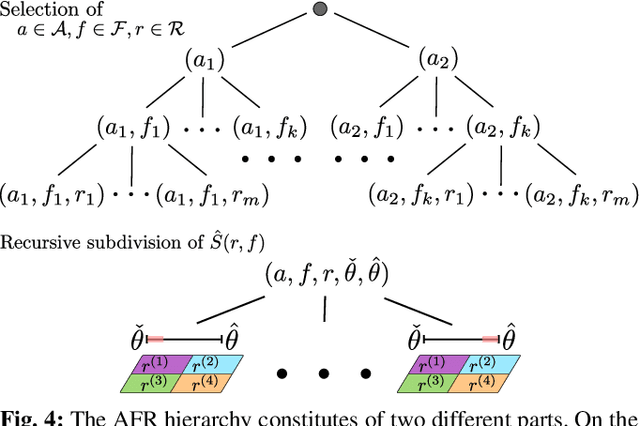
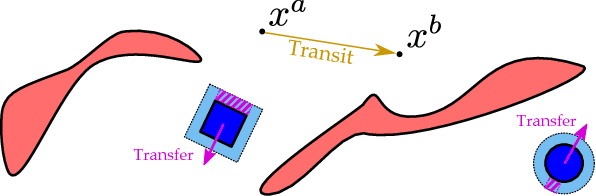
We address the problem of motion planning for a robotic manipulator with the task to place a grasped object in a cluttered environment. In this task, we need to locate a collision-free pose for the object that a) facilitates the stable placement of the object, b) is reachable by the robot manipulator and c) optimizes a user-given placement objective. Because of the placement objective, this problem is more challenging than classical motion planning where the target pose is defined from the start. To solve this task, we propose an anytime algorithm that integrates sampling-based motion planning for the robot manipulator with a novel hierarchical search for suitable placement poses. We evaluate our approach on a dual-arm robot for two different placement objectives, and observe its effectiveness even in challenging scenarios.
Learning Manipulation States and Actions for Efficient Non-prehensile Rearrangement Planning
Jan 11, 2019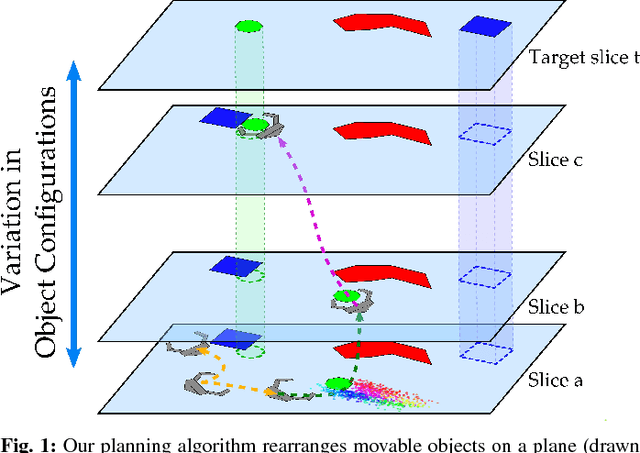
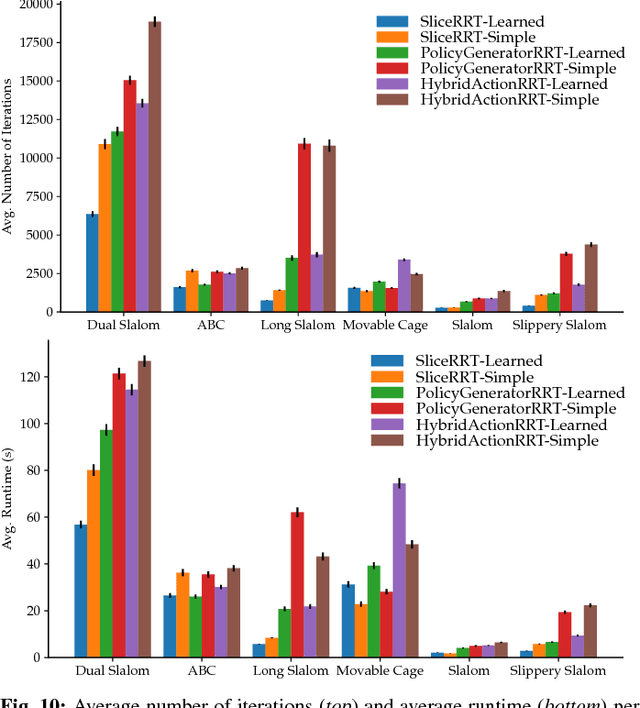
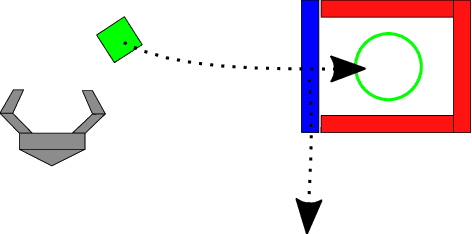
This paper addresses non-prehensile rearrangement planning problems where a robot is tasked to rearrange objects among obstacles on a planar surface. We present an efficient planning algorithm that is designed to impose few assumptions on the robot's non-prehensile manipulation abilities and is simple to adapt to different robot embodiments. For this, we combine sampling-based motion planning with reinforcement learning and generative modeling. Our algorithm explores the composite configuration space of objects and robot as a search over robot actions, forward simulated in a physics model. This search is guided by a generative model that provides robot states from which an object can be transported towards a desired state, and a learned policy that provides corresponding robot actions. As an efficient generative model, we apply Generative Adversarial Networks. We implement and evaluate our approach for robots endowed with configuration spaces in SE(2). We demonstrate empirically the efficacy of our algorithm design choices and observe more than 2x speedup in planning time on various test scenarios compared to a state-of-the-art approach.