 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Placement Planning and Optimization for Robot Manipulators
Paper and Code
Jul 04, 2019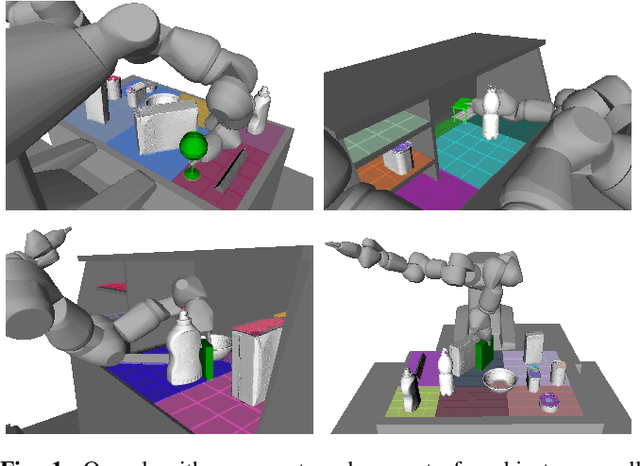
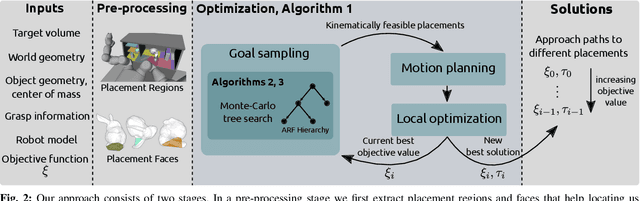
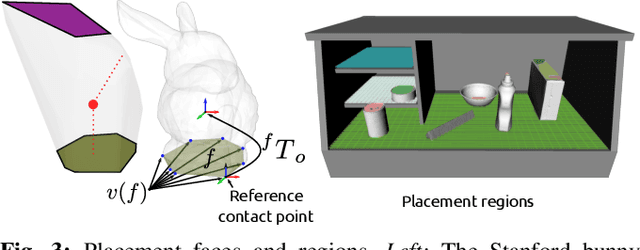
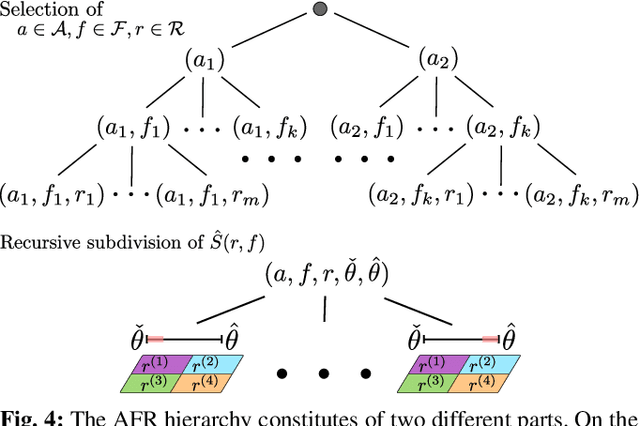
We address the problem of motion planning for a robotic manipulator with the task to place a grasped object in a cluttered environment. In this task, we need to locate a collision-free pose for the object that a) facilitates the stable placement of the object, b) is reachable by the robot manipulator and c) optimizes a user-given placement objective. Because of the placement objective, this problem is more challenging than classical motion planning where the target pose is defined from the start. To solve this task, we propose an anytime algorithm that integrates sampling-based motion planning for the robot manipulator with a novel hierarchical search for suitable placement poses. We evaluate our approach on a dual-arm robot for two different placement objectives, and observe its effectiveness even in challenging scenarios.