 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource-efficient Deep Neural Networks for Automotive Radar Interference Mitigation
Jan 25, 2022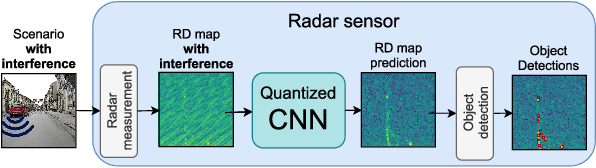
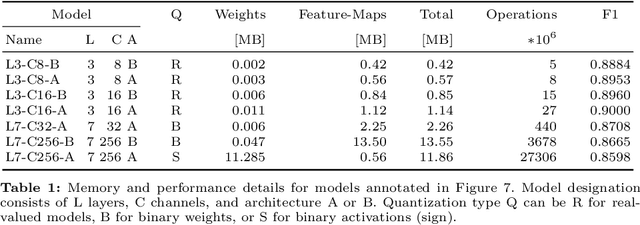
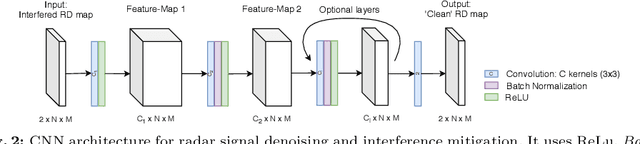
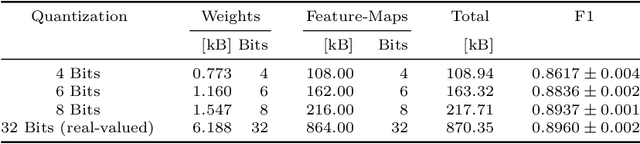
Radar sensors are crucial for environment perception of driver assistance systems as well as autonomous vehicles. With a rising number of radar sensors and the so far unregulated automotive radar frequency band, mutual interference is inevitable and must be dealt with. Algorithms and models operating on radar data are required to run the early processing steps on specialized radar sensor hardware. This specialized hardware typically has strict resource-constraints, i.e. a low memory capacity and low computational power. Convolutional Neural Network (CNN)-based approaches for denoising and interference mitigation yield promising results for radar processing in terms of performance. Regarding resource-constraints, however, CNNs typically exceed the hardware's capacities by far. In this paper we investigate quantization techniques for CNN-based denoising and interference mitigation of radar signals. We analyze the quantization of (i) weights and (ii) activations of different CNN-based model architectures. This quantization results in reduced memory requirements for model storage and during inference. We compare models with fixed and learned bit-widths and contrast two different methodologies for training quantized CNNs, i.e. the straight-through gradient estimator and training distributions over discrete weights. We illustrate the importance of structurally small real-valued base models for quantization and show that learned bit-widths yield the smallest models. We achieve a memory reduction of around 80\% compared to the real-valued baseline. Due to practical reasons, however, we recommend the use of 8 bits for weights and activations, which results in models that require only 0.2 megabytes of memory.
* 15 pages; published in IEEE Journal of Selected Topics in Signal Processing, Special Issue on Recent Advances in Automotive Radar Signal Processing, Volume: 15, Issue: 4, June 2021. arXiv admin note: text overlap with arXiv:2011.12706
On Efficient Uncertainty Estimation for Resource-Constrained Mobile Applications
Dec 01, 2021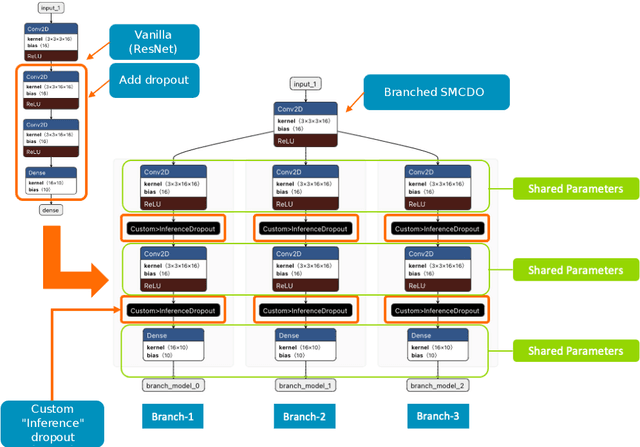

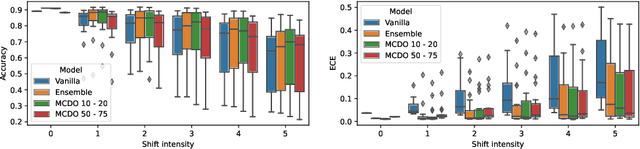
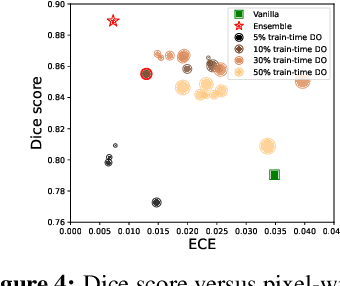
Deep neural networks have shown great success in prediction quality while reliable and robust uncertainty estimation remains a challenge. Predictive uncertainty supplements model predictions and enables improved functionality of downstream tasks including embedded and mobile applications, such as virtual reality, augmented reality, sensor fusion, and perception. These applications often require a compromise in complexity to obtain uncertainty estimates due to very limited memory and compute resources. We tackle this problem by building upon Monte Carlo Dropout (MCDO) models using the Axolotl framework; specifically, we diversify sampled subnetworks, leverage dropout patterns, and use a branching technique to improve predictive performance while maintaining fast computations. We conduct experiments on (1) a multi-class classification task using the CIFAR10 dataset, and (2) a more complex human body segmentation task. Our results show the effectiveness of our approach by reaching close to Deep Ensemble prediction quality and uncertainty estimation, while still achieving faster inference on resource-limited mobile platforms.
Complex-valued Convolutional Neural Networks for Enhanced Radar Signal Denoising and Interference Mitigation
Apr 29, 2021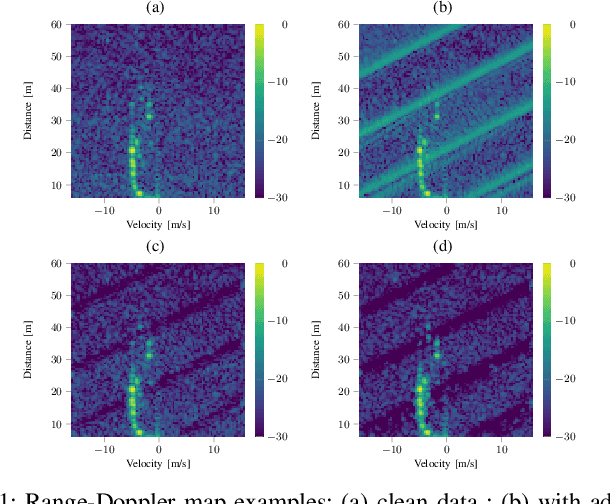
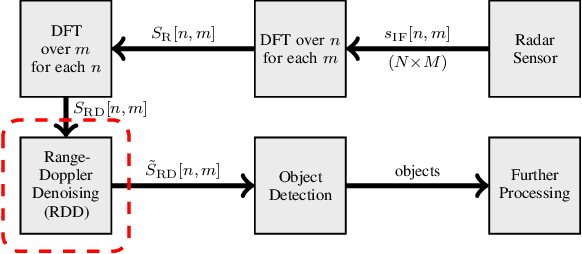
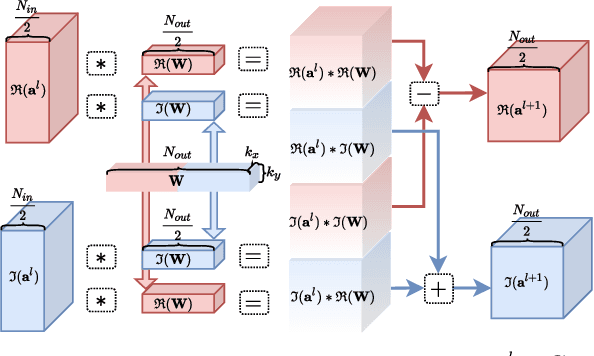
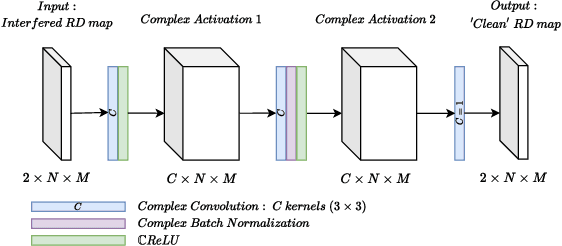
Autonomous driving highly depends on capable sensors to perceive the environment and to deliver reliable information to the vehicles' control systems. To increase its robustness, a diversified set of sensors is used, including radar sensors. Radar is a vital contribution of sensory information, providing high resolution range as well as velocity measurements. The increased use of radar sensors in road traffic introduces new challenges. As the so far unregulated frequency band becomes increasingly crowded, radar sensors suffer from mutual interference between multiple radar sensors. This interference must be mitigated in order to ensure a high and consistent detection sensitivity. In this paper, we propose the use of Complex-Valued Convolutional Neural Networks (CVCNNs) to address the issue of mutual interference between radar sensors. We extend previously developed methods to the complex domain in order to process radar data according to its physical characteristics. This not only increases data efficiency, but also improves the conservation of phase information during filtering, which is crucial for further processing, such as angle estimation. Our experiments show, that the use of CVCNNs increases data efficiency, speeds up network training and substantially improves the conservation of phase information during interference removal.
Deep Interference Mitigation and Denoising of Real-World FMCW Radar Signals
Dec 04, 2020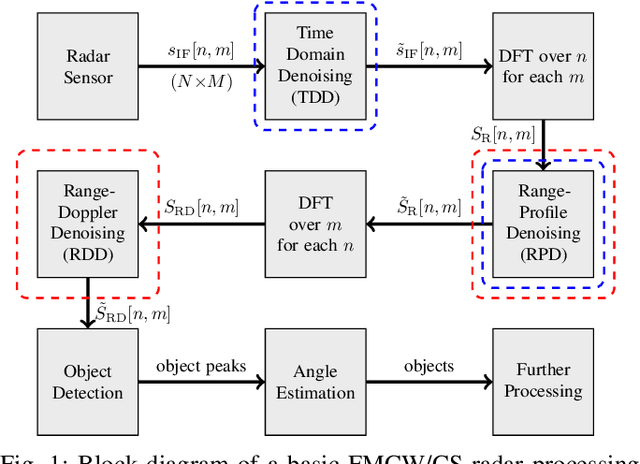

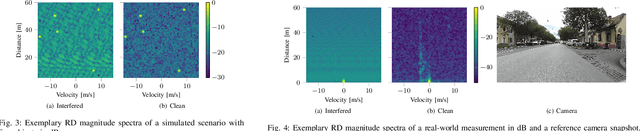

Radar sensors are crucial for environment perception of driver assistance systems as well as autonomous cars. Key performance factors are a fine range resolution and the possibility to directly measure velocity. With a rising number of radar sensors and the so far unregulated automotive radar frequency band, mutual interference is inevitable and must be dealt with. Sensors must be capable of detecting, or even mitigating the harmful effects of interference, which include a decreased detection sensitivity. In this paper, we evaluate a Convolutional Neural Network (CNN)-based approach for interference mitigation on real-world radar measurements. We combine real measurements with simulated interference in order to create input-output data suitable for training the model. We analyze the performance to model complexity relation on simulated and measurement data, based on an extensive parameter search. Further, a finite sample size performance comparison shows the effectiveness of the model trained on either simulated or real data as well as for transfer learning. A comparative performance analysis with the state of the art emphasizes the potential of CNN-based models for interference mitigation and denoising of real-world measurements, also considering resource constraints of the hardware.
Quantized Neural Networks for Radar Interference Mitigation
Dec 01, 2020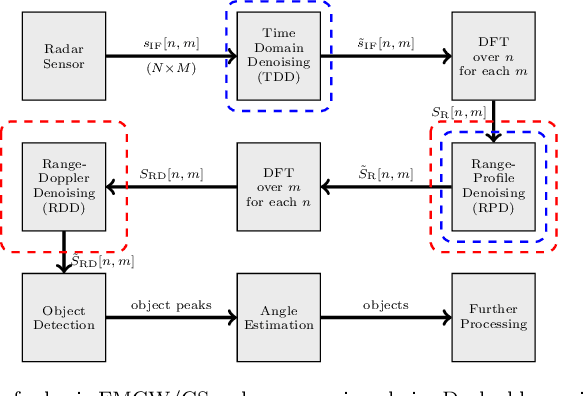
Radar sensors are crucial for environment perception of driver assistance systems as well as autonomous vehicles. Key performance factors are weather resistance and the possibility to directly measure velocity. With a rising number of radar sensors and the so far unregulated automotive radar frequency band, mutual interference is inevitable and must be dealt with. Algorithms and models operating on radar data in early processing stages are required to run directly on specialized hardware, i.e. the radar sensor. This specialized hardware typically has strict resource-constraints, i.e. a low memory capacity and low computational power. Convolutional Neural Network (CNN)-based approaches for denoising and interference mitigation yield promising results for radar processing in terms of performance. However, these models typically contain millions of parameters, stored in hundreds of megabytes of memory, and require additional memory during execution. In this paper we investigate quantization techniques for CNN-based denoising and interference mitigation of radar signals. We analyze the quantization potential of different CNN-based model architectures and sizes by considering (i) quantized weights and (ii) piecewise constant activation functions, which results in reduced memory requirements for model storage and during the inference step respectively.
Complex Signal Denoising and Interference Mitigation for Automotive Radar Using Convolutional Neural Networks
Jun 25, 2019
Driver assistance systems as well as autonomous cars have to rely on sensors to perceive their environment. A heterogeneous set of sensors is used to perform this task robustly. Among them, radar sensors are indispensable because of their range resolution and the possibility to directly measure velocity. Since more and more radar sensors are deployed on the streets, mutual interference must be dealt with. In the so far unregulated automotive radar frequency band, a sensor must be capable of detecting, or even mitigating the harmful effects of interference, which include a decreased detection sensitivity. In this paper, we address this issue with Convolutional Neural Networks (CNNs), which are state-of-the-art machine learning tools. We show that the ability of CNNs to find structured information in data while preserving local information enables superior denoising performance. To achieve this, CNN parameters are found using training with simulated data and integrated into the automotive radar signal processing chain. The presented method is compared with the state of the art, highlighting its promising performance. Hence, CNNs can be employed for interference mitigation as an alternative to conventional signal processing methods. Code and pre-trained models are available at https://github.com/johanna-rock/imRICnn.