 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDialogue You Can Trust: Human and AI Perspectives on Generated Conversations
Sep 03, 2024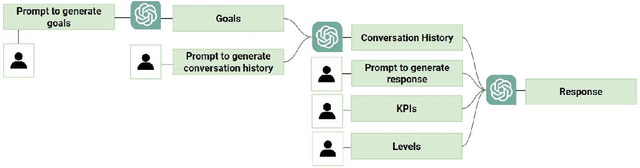
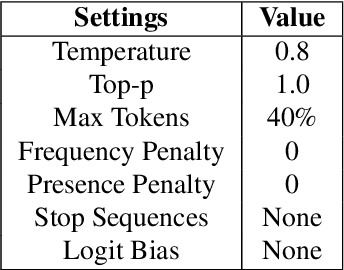
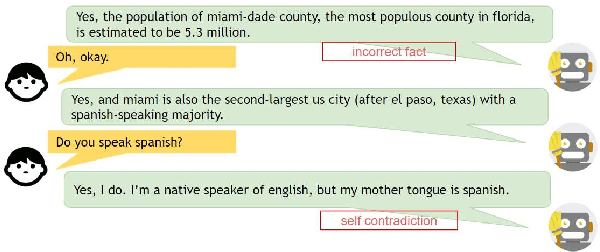
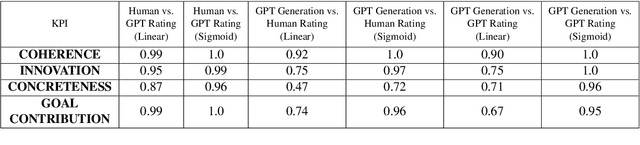
As dialogue systems and chatbots increasingly integrate into everyday interactions, the need for efficient and accurate evaluation methods becomes paramount. This study explores the comparative performance of human and AI assessments across a range of dialogue scenarios, focusing on seven key performance indicators (KPIs): Coherence, Innovation, Concreteness, Goal Contribution, Commonsense Contradiction, Incorrect Fact, and Redundancy. Utilizing the GPT-4o API, we generated a diverse dataset of conversations and conducted a two-part experimental analysis. In Experiment 1, we evaluated multi-party conversations on Coherence, Innovation, Concreteness, and Goal Contribution, revealing that GPT models align closely with human judgments. Notably, both human and AI evaluators exhibited a tendency towards binary judgment rather than linear scaling, highlighting a shared challenge in these assessments. Experiment 2 extended the work of Finch et al. (2023) by focusing on dyadic dialogues and assessing Commonsense Contradiction, Incorrect Fact, and Redundancy. The results indicate that while GPT-4o demonstrates strong performance in maintaining factual accuracy and commonsense reasoning, it still struggles with reducing redundancy and self-contradiction. Our findings underscore the potential of GPT models to closely replicate human evaluation in dialogue systems, while also pointing to areas for improvement. This research offers valuable insights for advancing the development and implementation of more refined dialogue evaluation methodologies, contributing to the evolution of more effective and human-like AI communication tools.
Utilization of domain knowledge to improve POMDP belief estimation
Feb 17, 2023The partially observable Markov decision process (POMDP) framework is a common approach for decision making under uncertainty. Recently, multiple studies have shown that by integrating relevant domain knowledge into POMDP belief estimation, we can improve the learned policy's performance. In this study, we propose a novel method for integrating the domain knowledge into probabilistic belief update in POMDP framework using Jeffrey's rule and normalization. We show that the domain knowledge can be utilized to reduce the data requirement and improve performance for POMDP policy learning with RL.
Apprenticeship Learning for Model Parameters of Partially Observable Environments
Jun 27, 2012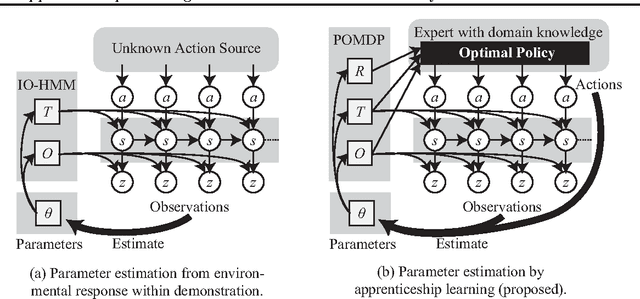
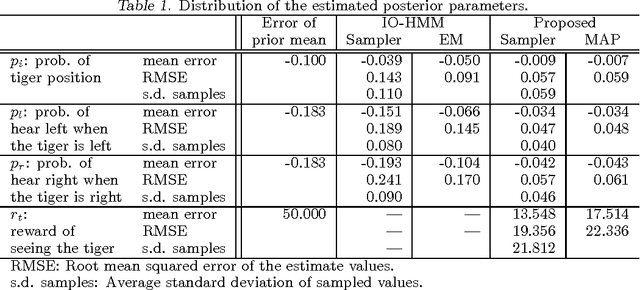
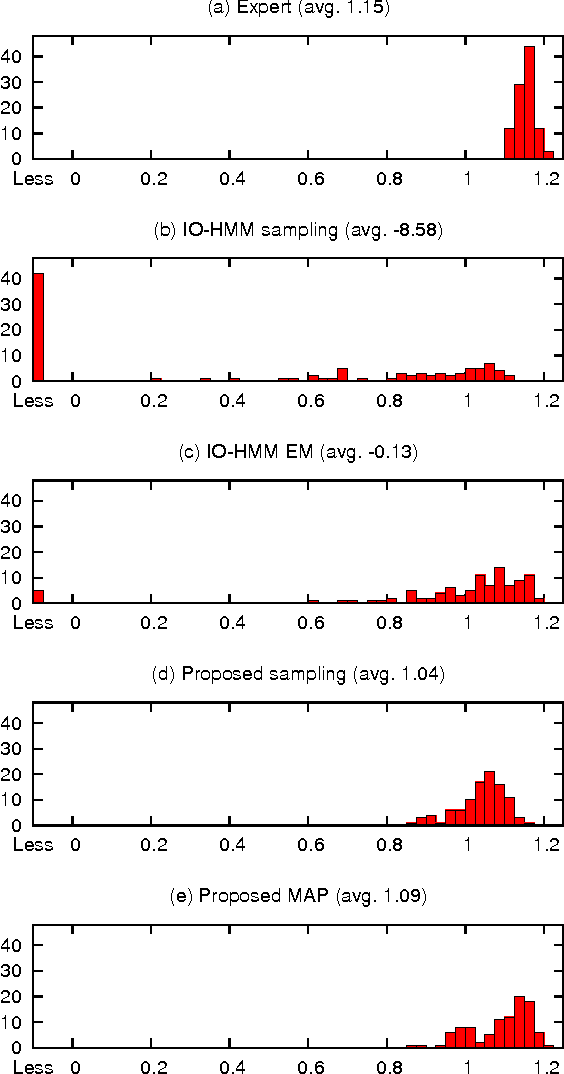
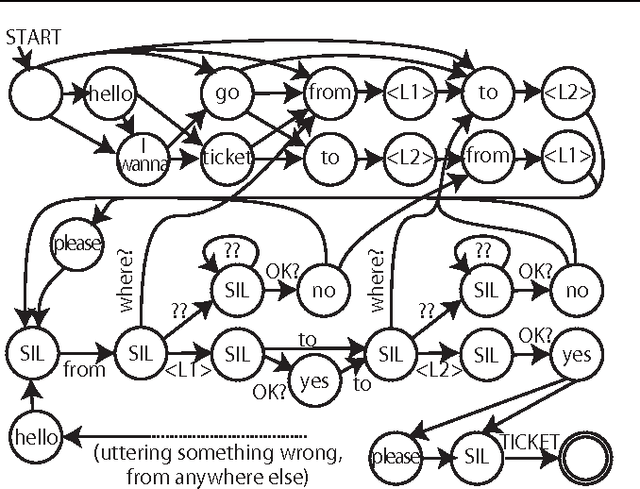
We consider apprenticeship learning, i.e., having an agent learn a task by observing an expert demonstrating the task in a partially observable environment when the model of the environment is uncertain. This setting is useful in applications where the explicit modeling of the environment is difficult, such as a dialogue system. We show that we can extract information about the environment model by inferring action selection process behind the demonstration, under the assumption that the expert is choosing optimal actions based on knowledge of the true model of the target environment. Proposed algorithms can achieve more accurate estimates of POMDP parameters and better policies from a short demonstration, compared to methods that learns only from the reaction from the environment.