 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApprenticeship Learning for Model Parameters of Partially Observable Environments
Paper and Code
Jun 27, 2012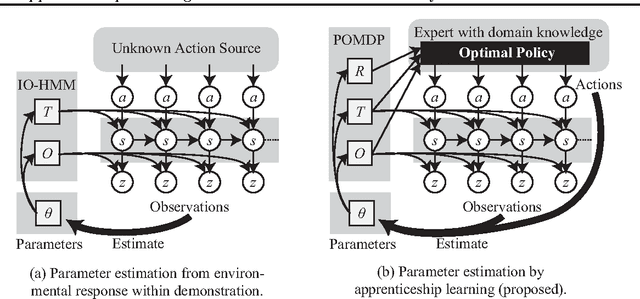
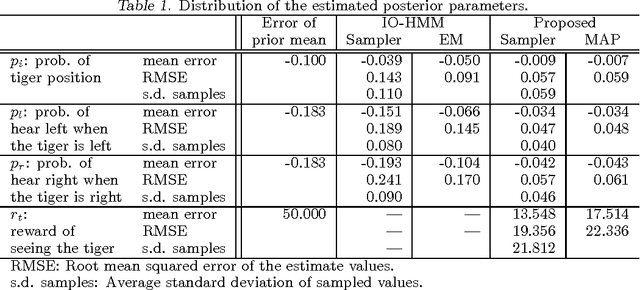
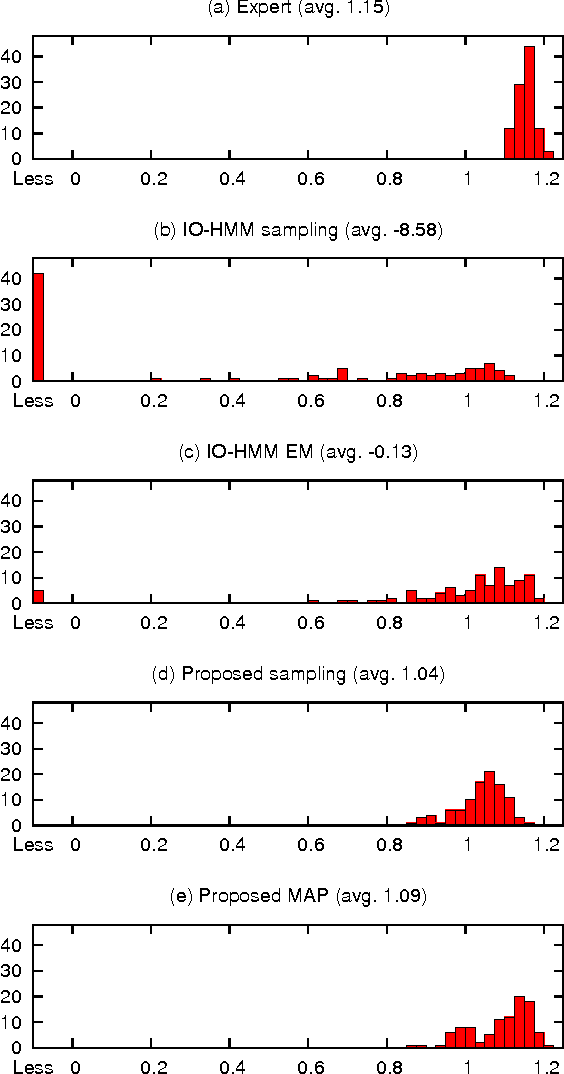
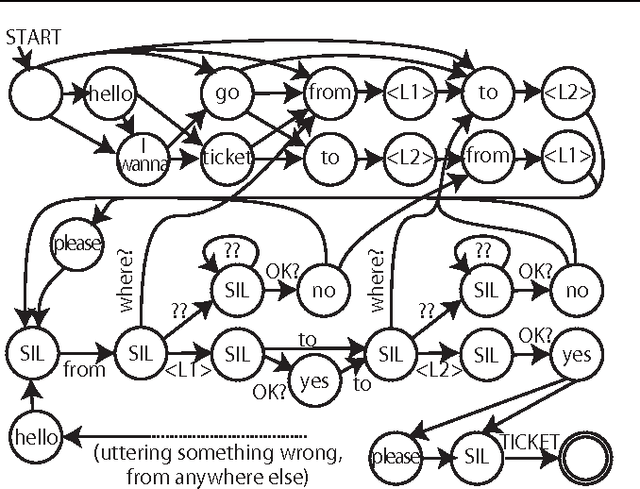
We consider apprenticeship learning, i.e., having an agent learn a task by observing an expert demonstrating the task in a partially observable environment when the model of the environment is uncertain. This setting is useful in applications where the explicit modeling of the environment is difficult, such as a dialogue system. We show that we can extract information about the environment model by inferring action selection process behind the demonstration, under the assumption that the expert is choosing optimal actions based on knowledge of the true model of the target environment. Proposed algorithms can achieve more accurate estimates of POMDP parameters and better policies from a short demonstration, compared to methods that learns only from the reaction from the environment.