 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet's Push Things Forward: A Survey on Robot Pushing
May 13, 2019


As robot make their way out of factories into human environments, outer space, and beyond, they require the skill to manipulate their environment in multifarious, unforeseeable circumstances. With this regard, pushing is an essential motion primitive that dramatically extends a robot's manipulation repertoire. In this work, we review the robotic pushing literature. While focusing on work concerned with predicting the motion of pushed objects, we also cover relevant applications of pushing for planning and control. Beginning with analytical approaches, under which we also subsume physics engines, we then proceed to discuss work on learning models from data. In doing so, we dedicate a separate section to deep learning approaches which have seen a recent upsurge in the literature. Concluding remarks and further research perspectives are given at the end of the paper.
Feature-Based Transfer Learning for Robotic Push Manipulation
May 09, 2019

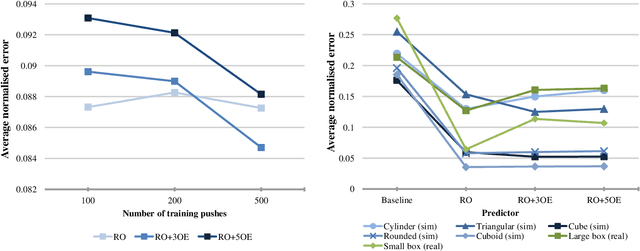
This paper presents a data-efficient approach to learning transferable forward models for robotic push manipulation. Our approach extends our previous work on contact-based predictors by leveraging information on the pushed object's local surface features. We test the hypothesis that, by conditioning predictions on local surface features, we can achieve generalisation across objects of different shapes. In doing so, we do not require a CAD model of the object but rather rely on a point cloud object model (PCOM). Our approach involves learning motion models that are specific to contact models. Contact models encode the contacts seen during training time and allow generating similar contacts at prediction time. Predicting on familiar ground reduces the motion models' sample complexity while using local contact information for prediction increases their transferability. In extensive experiments in simulation, our approach is capable of transfer learning for various test objects, outperforming a baseline predictor. We support those results with a proof of concept on a real robot.