 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePola4All: survey of polarimetric applications and an open-source toolkit to analyze polarization
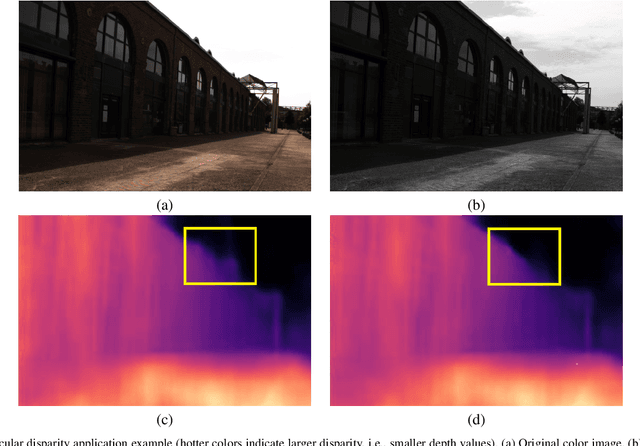
Dec 22, 2023Polarization information of the light can provide rich cues for computer vision and scene understanding tasks, such as the type of material, pose, and shape of the objects. With the advent of new and cheap polarimetric sensors, this imaging modality is becoming accessible to a wider public for solving problems such as pose estimation, 3D reconstruction, underwater navigation, and depth estimation. However, we observe several limitations regarding the usage of this sensorial modality, as well as a lack of standards and publicly available tools to analyze polarization images. Furthermore, although polarization camera manufacturers usually provide acquisition tools to interface with their cameras, they rarely include processing algorithms that make use of the polarization information. In this paper, we review recent advances in applications that involve polarization imaging, including a comprehensive survey of recent advances on polarization for vision and robotics perception tasks. We also introduce a complete software toolkit that provides common standards to communicate with and process information from most of the existing micro-grid polarization cameras on the market. The toolkit also implements several image processing algorithms for this modality, and it is publicly available on GitHub: https://github.com/vibot-lab/Pola4all_JEI_2023.
A Practical Calibration Method for RGB Micro-Grid Polarimetric Cameras
Aug 29, 2022
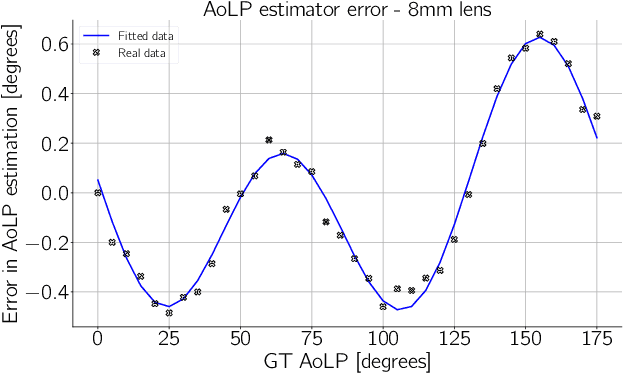
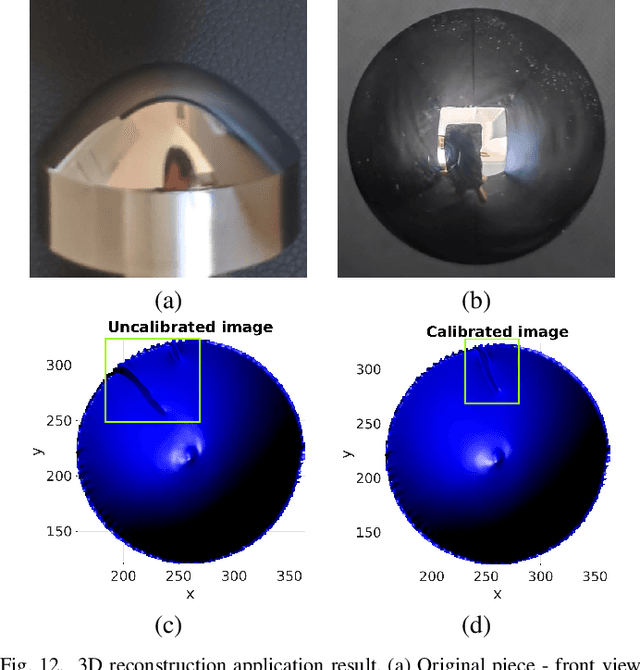
Polarimetric imaging has been applied in a growing number of applications in robotic vision (ex. underwater navigation, glare removal, de-hazing, object classification, and depth estimation). One can find on the market RGB Polarization cameras that can capture both color and polarimetric state of the light in a single snapshot. Due to the sensor's characteristic dispersion, and the use of lenses, it is crucial to calibrate these types of cameras so as to obtain correct polarization measurements. The calibration methods that have been developed so far are either not adapted to this type of cameras, or they require complex equipment and time consuming experiments in strict setups. In this paper, we propose a new method to overcome the need for complex optical systems to efficiently calibrate these cameras. We show that the proposed calibration method has several advantages such as that any user can easily calibrate the camera using a uniform, linearly polarized light source without any a priori knowledge of its polarization state, and with a limited number of acquisitions. We will make our calibration code publicly available.
* This is a preprint version of the paper to appear at IEEE Robotics and Automation Letters (RAL). The final journal version will be available at https://doi.org/10.1109/LRA.2022.3192655
Solving the Periodic Timetabling Problem using a Genetic Algorithm
Nov 24, 2014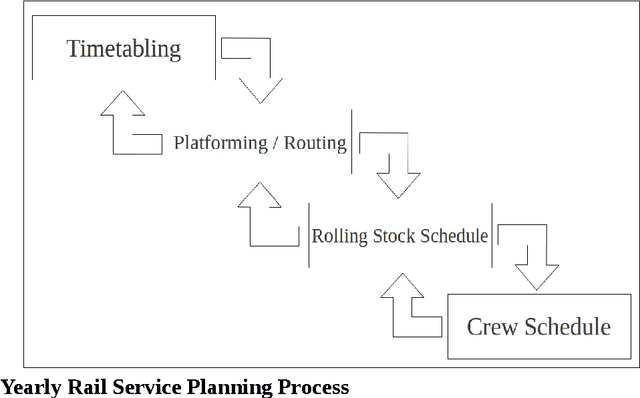
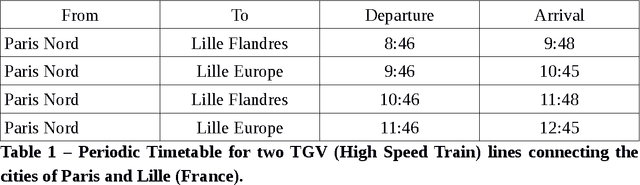
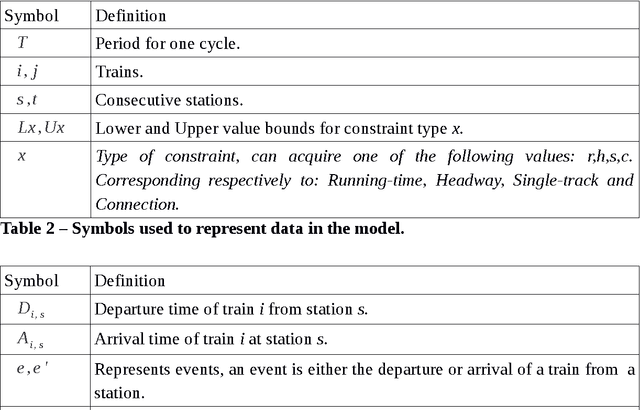
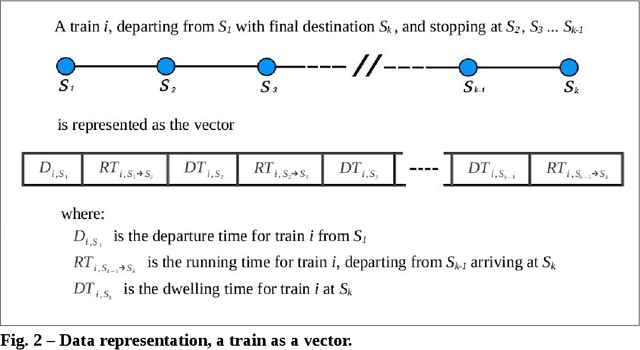
In railway operations, a timetable is established to determine the departure and arrival times for the trains or other rolling stock at the different stations or relevant points inside the rail network or a subset of this network. The elaboration of this timetable is done to respond to the commercial requirements for both passenger and freight traffic, but also it must respect a set of security and capacity constraints associated with the railway network, rolling stock and legislation. Combining these requirements and constraints, as well as the important number of trains and schedules to plan, makes the preparation of a feasible timetable a complex and time-consuming process, that normally takes several months to be completed. This article addresses the problem of generating periodic timetables, which means that the involved trains operate in a recurrent pattern. For instance, the trains belonging to the same train line, depart from some station every 15 minutes or one hour. To tackle the problem, we present a constraint-based model suitable for this kind of problem. Then, we propose a genetic algorithm, allowing a rapid generation of feasible periodic timetables. Finally, two case studies are presented, the first, describing a sub-set of the Netherlands rail network, and the second a large portion of the Nord-pas-de-Calais regional rail network, both of them are then solved using our algorithm and the results are presented and discussed.