 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuasi-static Analysis of Planar Sliding Using Friction Patches
Apr 14, 2019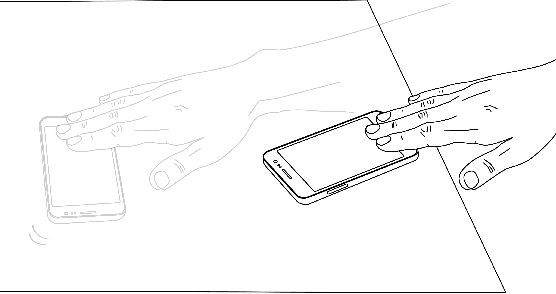
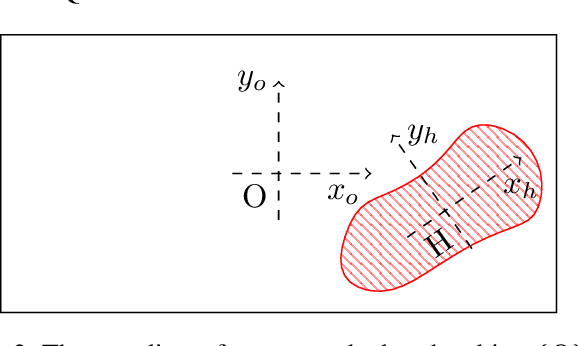
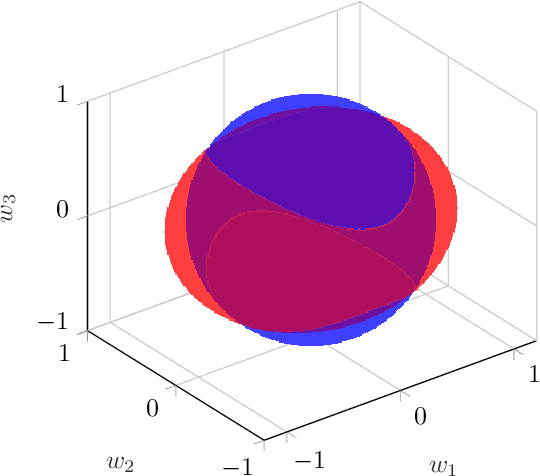
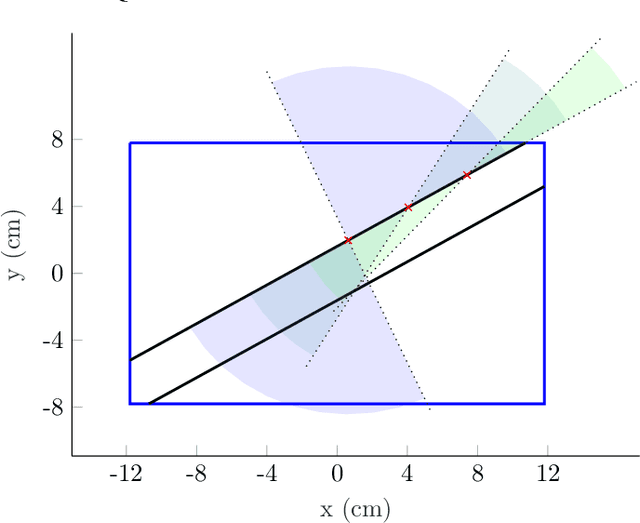
Planar sliding of objects is modeled and analyzed. The model can be used for non-prehensile manipulation of objects lying on a surface. We study possible motions generated by frictional contacts, such as those arising between a soft finger and a flat object on a table. Specifically, using a quasi-static analysis we are able to derive a hybrid dynamical system to predict the motion of the object. The model can be used to find fixed-points of the system and the path taken by the object to reach such configurations. Important information for planning, such as the conditions in which the object sticks to the friction patch, pivots, or completely slides against it are obtained. Experimental results confirm the validity of the model for a wide range of applications.
Robotic Tactile Perception of Object Properties: A Review
Nov 10, 2017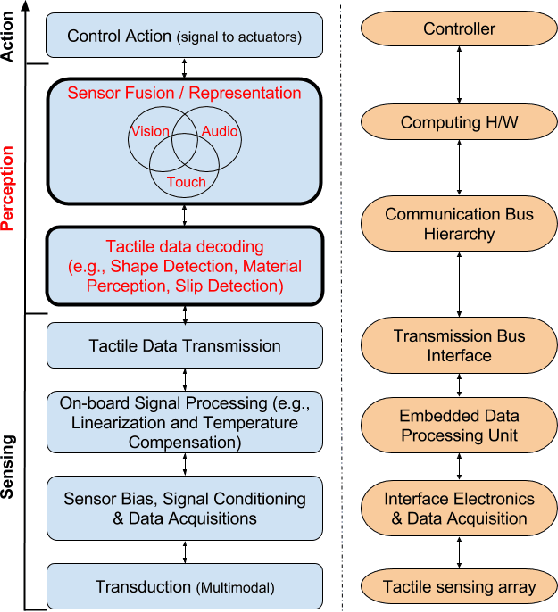
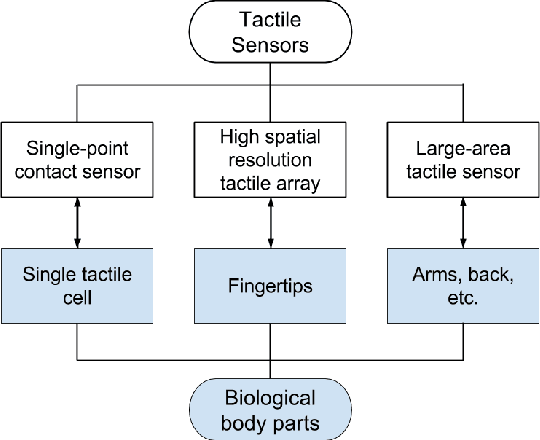

Touch sensing can help robots understand their sur- rounding environment, and in particular the objects they interact with. To this end, roboticists have, in the last few decades, developed several tactile sensing solutions, extensively reported in the literature. Research into interpreting the conveyed tactile information has also started to attract increasing attention in recent years. However, a comprehensive study on this topic is yet to be reported. In an effort to collect and summarize the major scientific achievements in the area, this survey extensively reviews current trends in robot tactile perception of object properties. Available tactile sensing technologies are briefly presented before an extensive review on tactile recognition of object properties. The object properties that are targeted by this review are shape, surface material and object pose. The role of touch sensing in combination with other sensing sources is also discussed. In this review, open issues are identified and future directions for applying tactile sensing in different tasks are suggested.