 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDimensionality Controls When Modularity Helps in Continual Learning
Jun 16, 2026Compositional learning systems must balance plasticity, the ability to acquire new knowledge, with stability, the preservation of previously learned components, especially when tasks share structure and risk interference. We study how modular architecture, task similarity, and representational dimensionality jointly shape compositional continual learning in a sequential A-B-A paradigm, comparing a task-partitioned recurrent network to a single-network baseline while inducing high- and low-dimensional regimes via weight-scale manipulations. In a high-dimensional "lazy" regime, both architectures achieve similar performance and internal geometry, suggesting that explicit modular structure has little impact when representations are weakly constrained. In a lower-dimensional "rich" regime, modularity becomes decisive: the modular network develops graded task-specific subspaces that overlap for similar tasks, partially align for moderately dissimilar tasks, and separate for dissimilar tasks, yielding a more compositional and interpretable organization than the single network. These findings identify the representational regime induced by initialization scale, which co-varies with representational dimensionality, as a key factor governing when compositional, modular structure is functionally beneficial in continual learning, and support viewing safety and robustness as problems of adaptive allocation of representational subspaces rather than fixed separation versus sharing.
Hypernetworks That Evolve Themselves
Dec 18, 2025



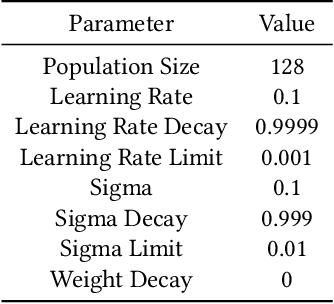
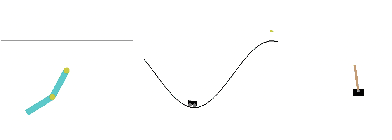
How can neural networks evolve themselves without relying on external optimizers? We propose Self-Referential Graph HyperNetworks, systems where the very machinery of variation and inheritance is embedded within the network. By uniting hypernetworks, stochastic parameter generation, and graph-based representations, Self-Referential GHNs mutate and evaluate themselves while adapting mutation rates as selectable traits. Through new reinforcement learning benchmarks with environmental shifts (CartPoleSwitch, LunarLander-Switch), Self-Referential GHNs show swift, reliable adaptation and emergent population dynamics. In the locomotion benchmark Ant-v5, they evolve coherent gaits, showing promising fine-tuning capabilities by autonomously decreasing variation in the population to concentrate around promising solutions. Our findings support the idea that evolvability itself can emerge from neural self-reference. Self-Referential GHNs reflect a step toward synthetic systems that more closely mirror biological evolution, offering tools for autonomous, open-ended learning agents.
When Does Neuroevolution Outcompete Reinforcement Learning in Transfer Learning Tasks?
May 28, 2025



The ability to continuously and efficiently transfer skills across tasks is a hallmark of biological intelligence and a long-standing goal in artificial systems. Reinforcement learning (RL), a dominant paradigm for learning in high-dimensional control tasks, is known to suffer from brittleness to task variations and catastrophic forgetting. Neuroevolution (NE) has recently gained attention for its robustness, scalability, and capacity to escape local optima. In this paper, we investigate an understudied dimension of NE: its transfer learning capabilities. To this end, we introduce two benchmarks: a) in stepping gates, neural networks are tasked with emulating logic circuits, with designs that emphasize modular repetition and variation b) ecorobot extends the Brax physics engine with objects such as walls and obstacles and the ability to easily switch between different robotic morphologies. Crucial in both benchmarks is the presence of a curriculum that enables evaluating skill transfer across tasks of increasing complexity. Our empirical analysis shows that NE methods vary in their transfer abilities and frequently outperform RL baselines. Our findings support the potential of NE as a foundation for building more adaptable agents and highlight future challenges for scaling NE to complex, real-world problems.
Bio-Inspired Plastic Neural Networks for Zero-Shot Out-of-Distribution Generalization in Complex Animal-Inspired Robots
Mar 16, 2025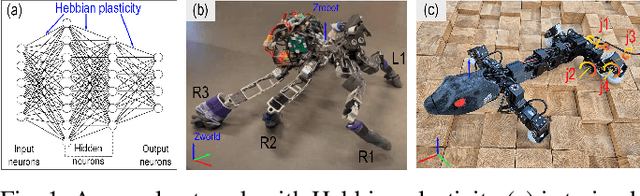
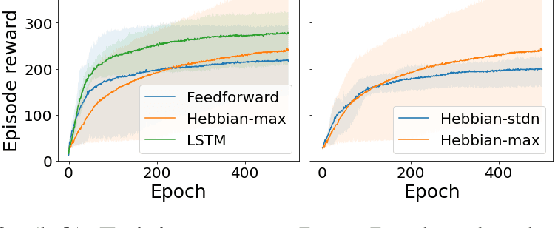
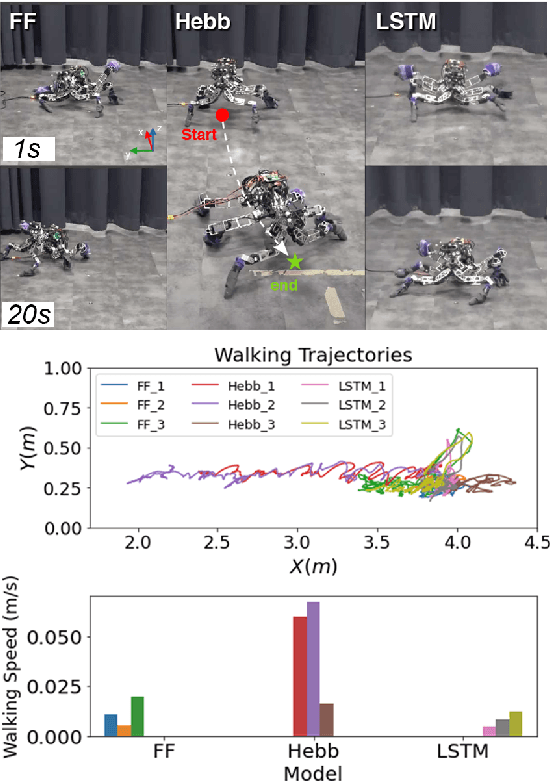
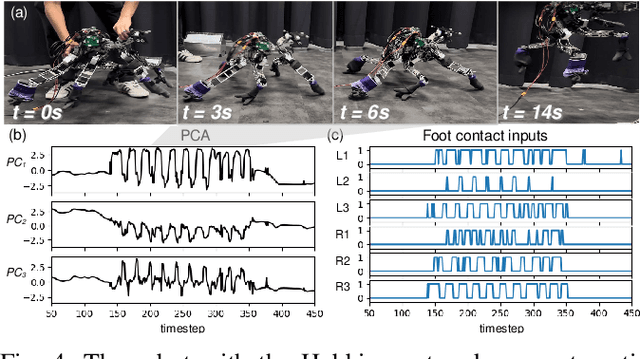
Artificial neural networks can be used to solve a variety of robotic tasks. However, they risk failing catastrophically when faced with out-of-distribution (OOD) situations. Several approaches have employed a type of synaptic plasticity known as Hebbian learning that can dynamically adjust weights based on local neural activities. Research has shown that synaptic plasticity can make policies more robust and help them adapt to unforeseen changes in the environment. However, networks augmented with Hebbian learning can lead to weight divergence, resulting in network instability. Furthermore, such Hebbian networks have not yet been applied to solve legged locomotion in complex real robots with many degrees of freedom. In this work, we improve the Hebbian network with a weight normalization mechanism for preventing weight divergence, analyze the principal components of the Hebbian's weights, and perform a thorough evaluation of network performance in locomotion control for real 18-DOF dung beetle-like and 16-DOF gecko-like robots. We find that the Hebbian-based plastic network can execute zero-shot sim-to-real adaptation locomotion and generalize to unseen conditions, such as uneven terrain and morphological damage.
Growing Artificial Neural Networks for Control: the Role of Neuronal Diversity
May 14, 2024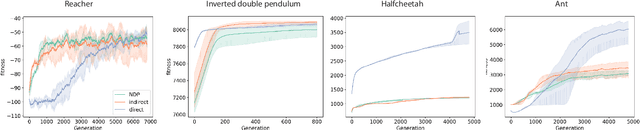

In biological evolution complex neural structures grow from a handful of cellular ingredients. As genomes in nature are bounded in size, this complexity is achieved by a growth process where cells communicate locally to decide whether to differentiate, proliferate and connect with other cells. This self-organisation is hypothesized to play an important part in the generalisation, and robustness of biological neural networks. Artificial neural networks (ANNs), on the other hand, are traditionally optimized in the space of weights. Thus, the benefits and challenges of growing artificial neural networks remain understudied. Building on the previously introduced Neural Developmental Programs (NDP), in this work we present an algorithm for growing ANNs that solve reinforcement learning tasks. We identify a key challenge: ensuring phenotypic complexity requires maintaining neuronal diversity, but this diversity comes at the cost of optimization stability. To address this, we introduce two mechanisms: (a) equipping neurons with an intrinsic state inherited upon neurogenesis; (b) lateral inhibition, a mechanism inspired by biological growth, which controlls the pace of growth, helping diversity persist. We show that both mechanisms contribute to neuronal diversity and that, equipped with them, NDPs achieve comparable results to existing direct and developmental encodings in complex locomotion tasks
Learning to Act through Evolution of Neural Diversity in Random Neural Networks
May 25, 2023Biological nervous systems consist of networks of diverse, sophisticated information processors in the form of neurons of different classes. In most artificial neural networks (ANNs), neural computation is abstracted to an activation function that is usually shared between all neurons within a layer or even the whole network; training of ANNs focuses on synaptic optimization. In this paper, we propose the optimization of neuro-centric parameters to attain a set of diverse neurons that can perform complex computations. Demonstrating the promise of the approach, we show that evolving neural parameters alone allows agents to solve various reinforcement learning tasks without optimizing any synaptic weights. While not aiming to be an accurate biological model, parameterizing neurons to a larger degree than the current common practice, allows us to ask questions about the computational abilities afforded by neural diversity in random neural networks. The presented results open up interesting future research directions, such as combining evolved neural diversity with activity-dependent plasticity.
Minimal Neural Network Models for Permutation Invariant Agents
May 12, 2022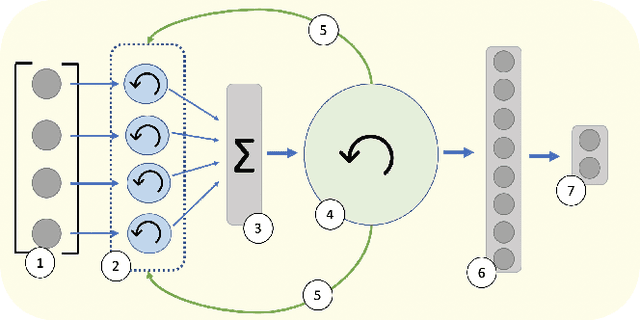
Organisms in nature have evolved to exhibit flexibility in face of changes to the environment and/or to themselves. Artificial neural networks (ANNs) have proven useful for controlling of artificial agents acting in environments. However, most ANN models used for reinforcement learning-type tasks have a rigid structure that does not allow for varying input sizes. Further, they fail catastrophically if inputs are presented in an ordering unseen during optimization. We find that these two ANN inflexibilities can be mitigated and their solutions are simple and highly related. For permutation invariance, no optimized parameters can be tied to a specific index of the input elements. For size invariance, inputs must be projected onto a common space that does not grow with the number of projections. Based on these restrictions, we construct a conceptually simple model that exhibit flexibility most ANNs lack. We demonstrate the model's properties on multiple control problems, and show that it can cope with even very rapid permutations of input indices, as well as changes in input size. Ablation studies show that is possible to achieve these properties with simple feedforward structures, but that it is much easier to optimize recurrent structures.
Evolving and Merging Hebbian Learning Rules: Increasing Generalization by Decreasing the Number of Rules
Apr 16, 2021



Generalization to out-of-distribution (OOD) circumstances after training remains a challenge for artificial agents. To improve the robustness displayed by plastic Hebbian neural networks, we evolve a set of Hebbian learning rules, where multiple connections are assigned to a single rule. Inspired by the biological phenomenon of the genomic bottleneck, we show that by allowing multiple connections in the network to share the same local learning rule, it is possible to drastically reduce the number of trainable parameters, while obtaining a more robust agent. During evolution, by iteratively using simple K-Means clustering to combine rules, our Evolve and Merge approach is able to reduce the number of trainable parameters from 61,440 to 1,920, while at the same time improving robustness, all without increasing the number of generations used. While optimization of the agents is done on a standard quadruped robot morphology, we evaluate the agents' performances on slight morphology modifications in a total of 30 unseen morphologies. Our results add to the discussion on generalization, overfitting and OOD adaptation. To create agents that can adapt to a wider array of unexpected situations, Hebbian learning combined with a regularising "genomic bottleneck" could be a promising research direction.