Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgressive extension of reinforcement learning action dimension for asymmetric assembly tasks
Apr 06, 2021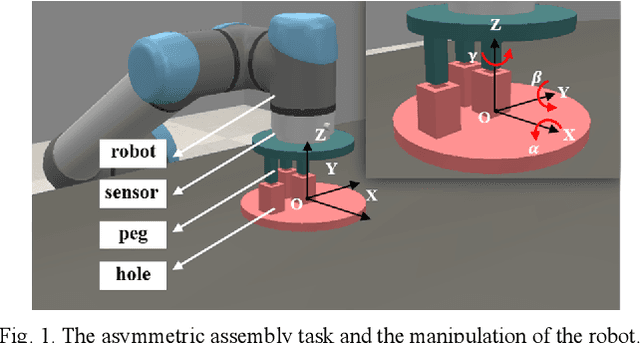
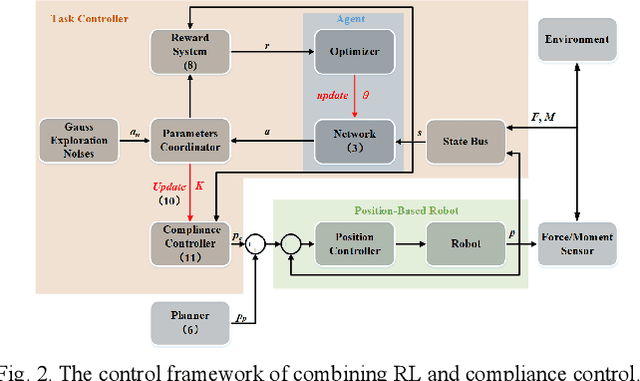
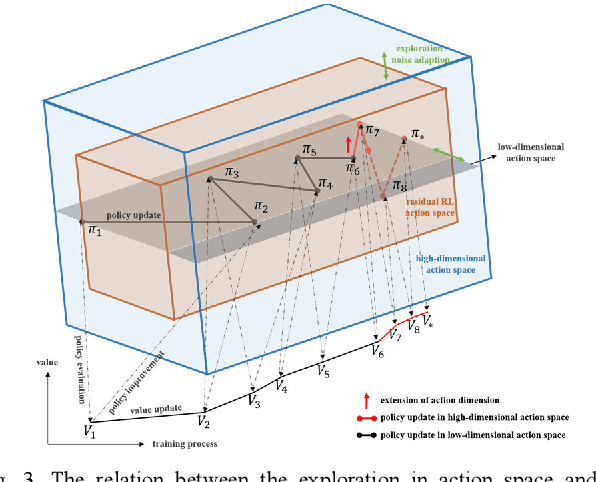
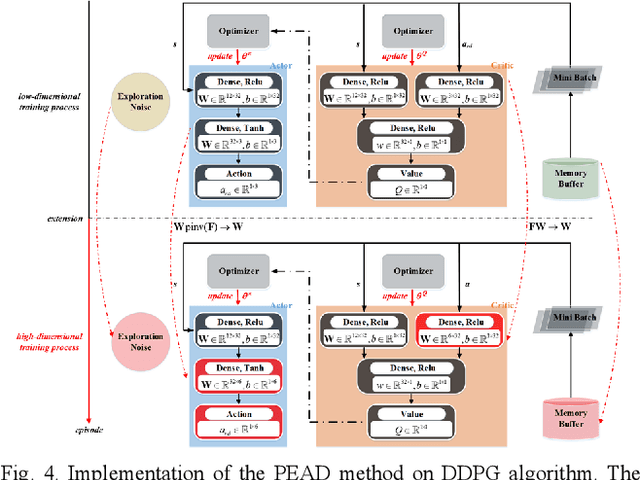
Reinforcement learning (RL) is always the preferred embodiment to construct the control strategy of complex tasks, like asymmetric assembly tasks. However, the convergence speed of reinforcement learning severely restricts its practical application. In this paper, the convergence is first accelerated by combining RL and compliance control. Then a completely innovative progressive extension of action dimension (PEAD) mechanism is proposed to optimize the convergence of RL algorithms. The PEAD method is verified in DDPG and PPO. The results demonstrate the PEAD method will enhance the data-efficiency and time-efficiency of RL algorithms as well as increase the stable reward, which provides more potential for the application of RL.
Via