 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-modal Garden Dataset and Hybrid 3D Dense Reconstruction Framework Based on Panoramic Stereo Images for a Trimming Robot
May 10, 2023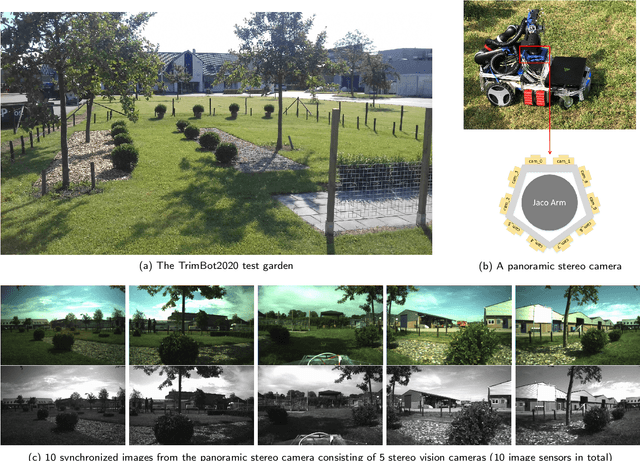
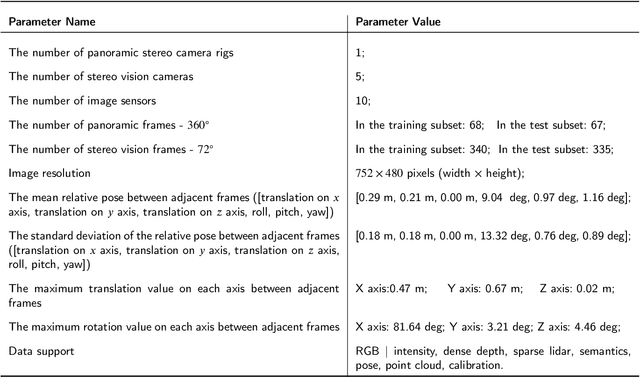
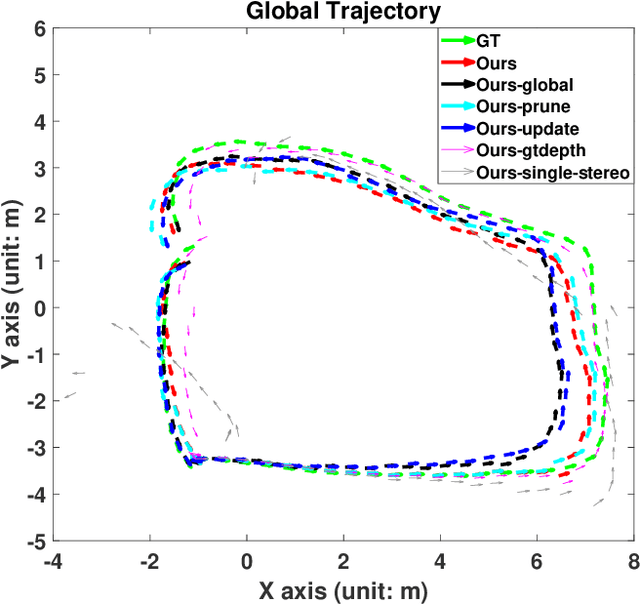
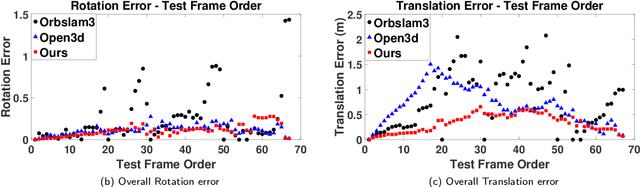
Recovering an outdoor environment's surface mesh is vital for an agricultural robot during task planning and remote visualization. Our proposed solution is based on a newly-designed panoramic stereo camera along with a hybrid novel software framework that consists of three fusion modules. The panoramic stereo camera with a pentagon shape consists of 5 stereo vision camera pairs to stream synchronized panoramic stereo images for the following three fusion modules. In the disparity fusion module, rectified stereo images produce the initial disparity maps using multiple stereo vision algorithms. Then, these initial disparity maps, along with the intensity images, are input into a disparity fusion network to produce refined disparity maps. Next, the refined disparity maps are converted into full-view point clouds or single-view point clouds for the pose fusion module. The pose fusion module adopts a two-stage global-coarse-to-local-fine strategy. In the first stage, each pair of full-view point clouds is registered by a global point cloud matching algorithm to estimate the transformation for a global pose graph's edge, which effectively implements loop closure. In the second stage, a local point cloud matching algorithm is used to match single-view point clouds in different nodes. Next, we locally refine the poses of all corresponding edges in the global pose graph using three proposed rules, thus constructing a refined pose graph. The refined pose graph is optimized to produce a global pose trajectory for volumetric fusion. In the volumetric fusion module, the global poses of all the nodes are used to integrate the single-view point clouds into the volume to produce the mesh of the whole garden. The proposed framework and its three fusion modules are tested on a real outdoor garden dataset to show the superiority of the performance.
A General Mobile Manipulator Automation Framework for Flexible Manufacturing in Hostile Industrial Environments
Feb 09, 2023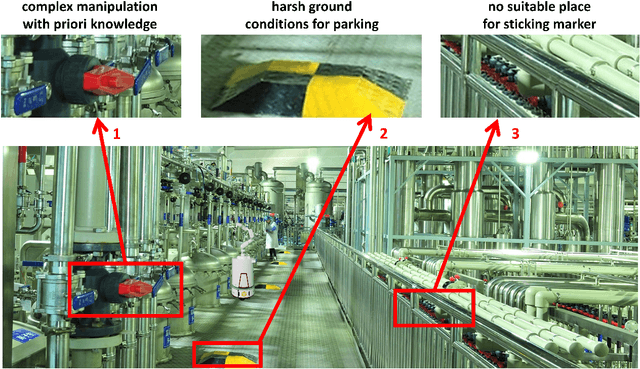
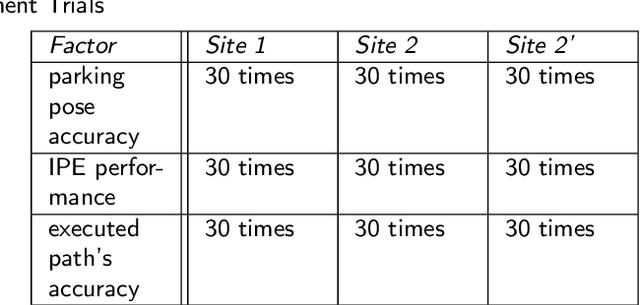
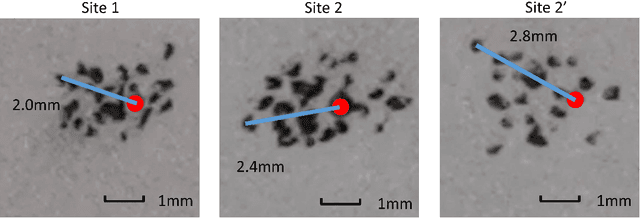
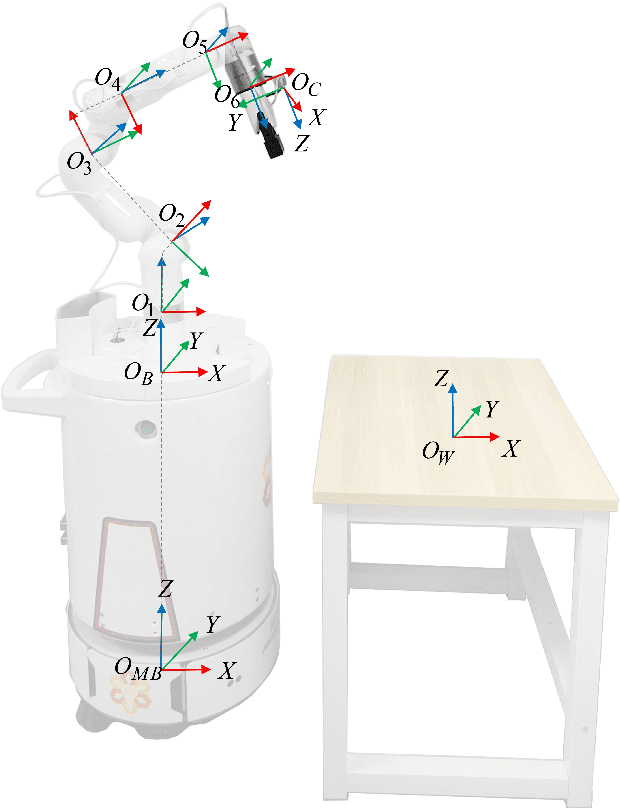
To enable a mobile manipulator to perform human tasks from a single teaching demonstration is vital to flexible manufacturing. We call our proposed method MMPA (Mobile Manipulator Process Automation with One-shot Teaching). Currently, there is no effective and robust MMPA framework which is not influenced by harsh industrial environments and the mobile base's parking precision. The proposed MMPA framework consists of two stages: collecting data (mobile base's location, environment information, end-effector's path) in the teaching stage for robot learning; letting the end-effector repeat the nearly same path as the reference path in the world frame to reproduce the work in the automation stage. More specifically, in the automation stage, the robot navigates to the specified location without the need of a precise parking. Then, based on colored point cloud registration, the proposed IPE (Iterative Pose Estimation by Eye & Hand) algorithm could estimate the accurate 6D relative parking pose of the robot arm base without the need of any marker. Finally, the robot could learn the error compensation from the parking pose's bias to modify the end-effector's path to make it repeat a nearly same path in the world coordinate system as recorded in the teaching stage. Hundreds of trials have been conducted with a real mobile manipulator to show the superior robustness of the system and the accuracy of the process automation regardless of the harsh industrial conditions and parking precision. For the released code, please contact marketing@amigaga.com