 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Multi-Task Deep Learning and Model Based Control Algorithm for Autonomous Driving
Dec 16, 2021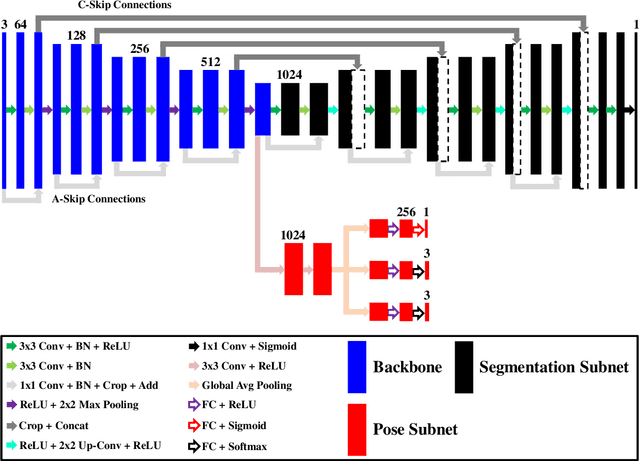
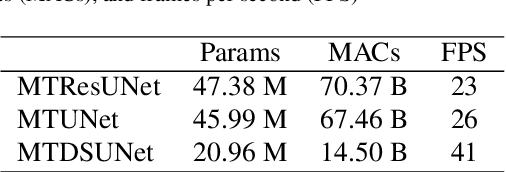

End-to-end driving with a deep learning neural network (DNN) has become a rapidly growing paradigm of autonomous driving in industry and academia. Yet safety measures and interpretability still pose challenges to this paradigm. We propose an end-to-end driving algorithm that integrates multi-task DNN, path prediction, and control models in a pipeline of data flow from sensory devices through these models to driving decisions. It provides quantitative measures to evaluate the holistic, dynamic, and real-time performance of end-to-end driving systems, and thus allows to quantify their safety and interpretability. The DNN is a modified UNet, a well known encoder-decoder neural network of semantic segmentation. It consists of one segmentation, one regression, and two classification tasks for lane segmentation, path prediction, and vehicle controls. We present three variants of the modified UNet architecture having different complexities, compare them on different tasks in four static measures for both single and multi-task (MT) architectures, and then identify the best one by two additional dynamic measures in real-time simulation. We also propose a learning- and model-based longitudinal controller using model predictive control method. With the Stanley lateral controller, our results show that MTUNet outperforms an earlier modified UNet in terms of curvature and lateral offset estimation on curvy roads at normal speed, which has been tested in a real car driving on real roads.
End-to-End Deep Learning of Lane Detection and Path Prediction for Real-Time Autonomous Driving
Feb 09, 2021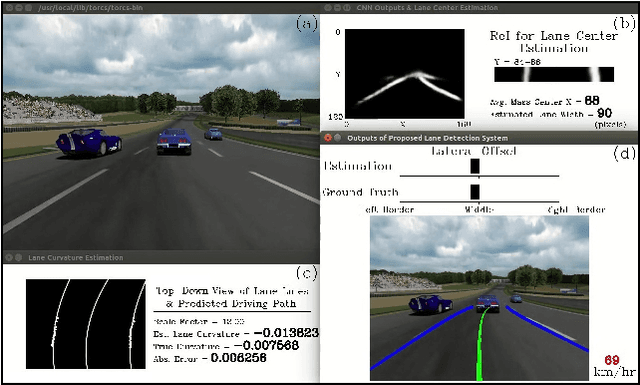
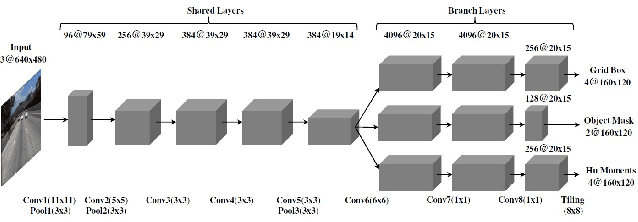
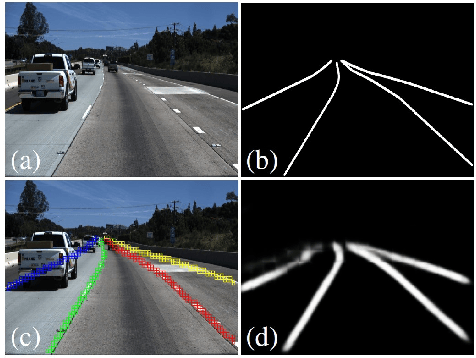
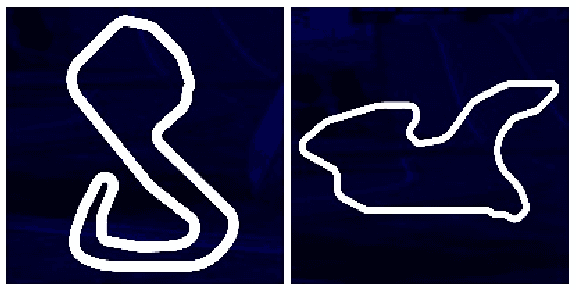
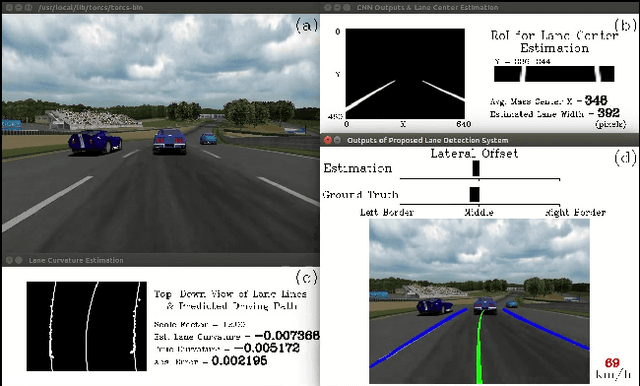
We propose an end-to-end three-task convolutional neural network (3TCNN) having two regression branches of bounding boxes and Hu moments and one classification branch of object masks for lane detection and road recognition. The Hu-moment regressor performs lane localization and road guidance using local and global Hu moments of segmented lane objects, respectively. Based on 3TCNN, we then propose lateral offset and path prediction (PP) algorithms to form an integrated model (3TCNN-PP) that can predict driving path with dynamic estimation of lane centerline and path curvature for real-time autonomous driving. We also develop a CNN-PP simulator that can be used to train a CNN by real or artificial traffic images, test it by artificial images, quantify its dynamic errors, and visualize its qualitative performance. Simulation results show that 3TCNN-PP is comparable to related CNNs and better than a previous CNN-PP, respectively. The code, annotated data, and simulation videos of this work can be found on our website for further research on NN-PP algorithms of autonomous driving.
Deep Learning and Control Algorithms of Direct Perception for Autonomous Driving
Nov 12, 2019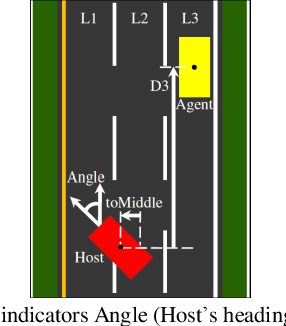
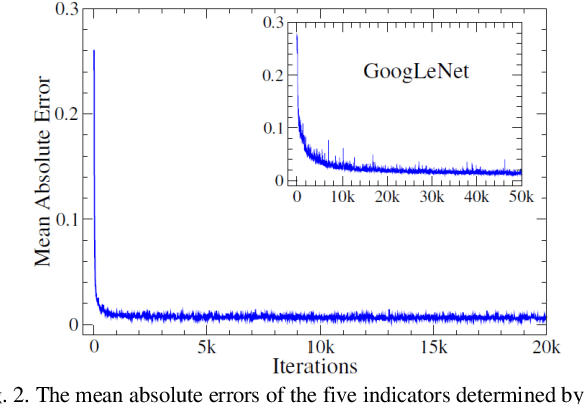
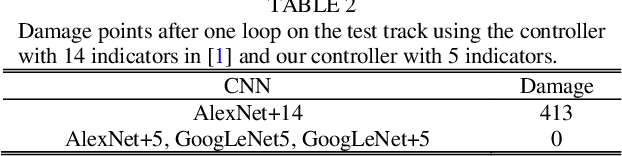
Based on the direct perception paradigm of autonomous driving, we investigate and modify the CNNs (convolutional neural networks) AlexNet and GoogLeNet that map an input image to few perception indicators (heading angle, distances to preceding cars, and distance to road centerline) for estimating driving affordances in highway traffic. We also design a controller with these indicators and the short-range sensor information of TORCS (the open racing car simulator) for driving simulated cars to avoid collisions. We collect a set of images from a TORCS camera in various driving scenarios, train these CNNs using the dataset, test them in unseen traffics, and find that they perform better than earlier algorithms and controllers in terms of training efficiency and driving stability. Source code and data are available on our website.