 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Multi-Task Deep Learning and Model Based Control Algorithm for Autonomous Driving
Paper and Code
Dec 16, 2021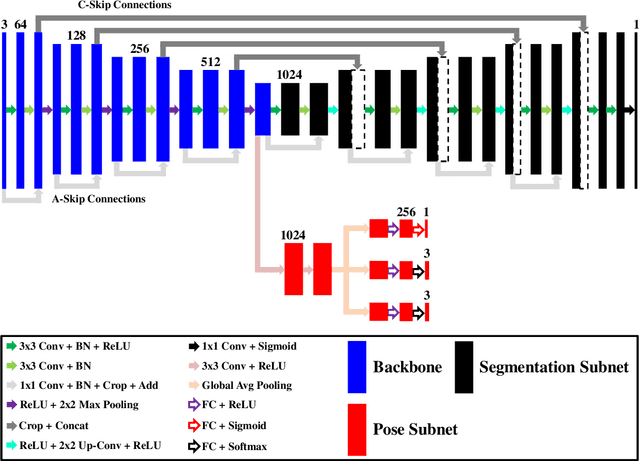
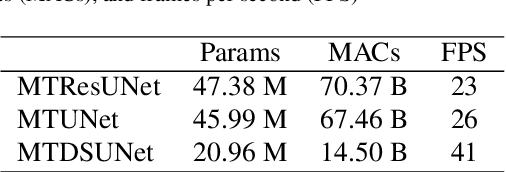
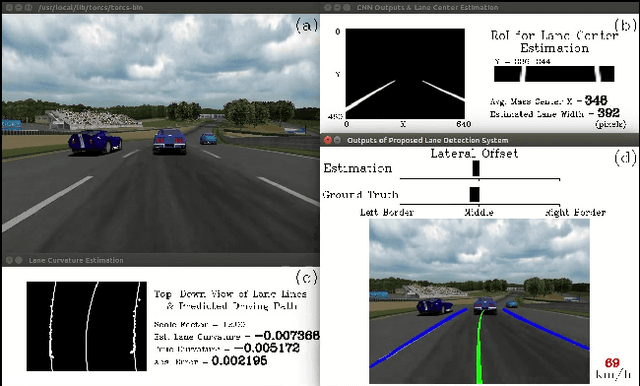

End-to-end driving with a deep learning neural network (DNN) has become a rapidly growing paradigm of autonomous driving in industry and academia. Yet safety measures and interpretability still pose challenges to this paradigm. We propose an end-to-end driving algorithm that integrates multi-task DNN, path prediction, and control models in a pipeline of data flow from sensory devices through these models to driving decisions. It provides quantitative measures to evaluate the holistic, dynamic, and real-time performance of end-to-end driving systems, and thus allows to quantify their safety and interpretability. The DNN is a modified UNet, a well known encoder-decoder neural network of semantic segmentation. It consists of one segmentation, one regression, and two classification tasks for lane segmentation, path prediction, and vehicle controls. We present three variants of the modified UNet architecture having different complexities, compare them on different tasks in four static measures for both single and multi-task (MT) architectures, and then identify the best one by two additional dynamic measures in real-time simulation. We also propose a learning- and model-based longitudinal controller using model predictive control method. With the Stanley lateral controller, our results show that MTUNet outperforms an earlier modified UNet in terms of curvature and lateral offset estimation on curvy roads at normal speed, which has been tested in a real car driving on real roads.