 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScore-Based Deterministic Density Sampling
Apr 25, 2025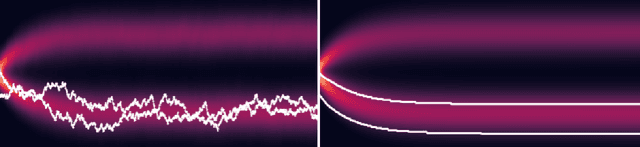
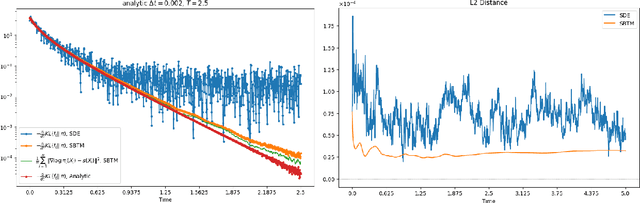
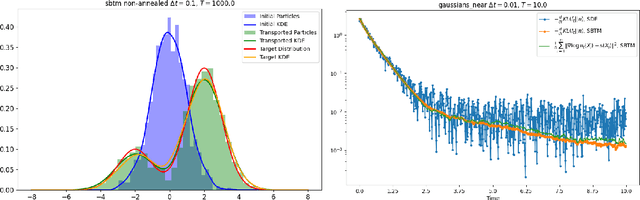
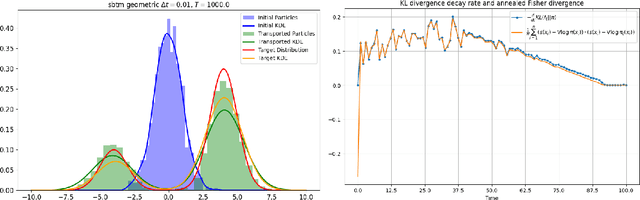
We propose and analyze a deterministic sampling framework using Score-Based Transport Modeling (SBTM) for sampling an unnormalized target density $\pi$. While diffusion generative modeling relies on pre-training the score function $\nabla \log f_t$ using samples from $\pi$, SBTM addresses the more general and challenging setting where only $\nabla \log\pi$ is known. SBTM approximates the Wasserstein gradient flow on KL$(f_t\|\pi)$ by learning the time-varying score $\nabla \log f_t$ on the fly using score matching. The learned score gives immediate access to relative Fisher information, providing a built-in convergence diagnostic. The deterministic trajectories are smooth, interpretable, and free of Brownian-motion noise, while having the same distribution as ULA. We prove that SBTM dissipates relative entropy at the same rate as the exact gradient flow, provided sufficient training. We further extend our framework to annealed dynamics, to handle non log-concave targets. Numerical experiments validate our theoretical findings: SBTM converges at the optimal rate, has smooth trajectories, and is easily integrated with annealed dynamics. We compare to the baselines of ULA and annealed ULA.
Target Tracking using Robust Sensor Motion Control
Feb 28, 2025We consider the problem of tracking moving targets using mobile wireless sensors (of possibly different types). This is a joint estimation and control problem in which a tracking system must take into account both target and sensor dynamics. We make minimal assumptions about the target dynamics, namely only that their accelerations are bounded. We develop a control law that determines the sensor motion control signals so as to maximize target resolvability as the target dynamics evolve. The method is given a tractable formulation that is amenable to an efficient search method and is evaluated in a series of experiments involving both round-trip time based ranging and Doppler frequency shift measurements
Transport based particle methods for the Fokker-Planck-Landau equation
May 16, 2024We propose a particle method for numerically solving the Landau equation, inspired by the score-based transport modeling (SBTM) method for the Fokker-Planck equation. This method can preserve some important physical properties of the Landau equation, such as the conservation of mass, momentum, and energy, and decay of estimated entropy. We prove that matching the gradient of the logarithm of the approximate solution is enough to recover the true solution to the Landau equation with Maxwellian molecules. Several numerical experiments in low and moderately high dimensions are performed, with particular emphasis on comparing the proposed method with the traditional particle or blob method.