 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Auto-Modeling of Formal Verification for NextG Protocols: A Multimodal cross- and self-attention Large Language Model Approach
Jan 02, 2024This paper introduces Auto-modeling of Formal Verification with Real-world Prompting for 5G and NextG protocols (AVRE), a novel system designed for the formal verification of Next Generation (NextG) communication protocols, addressing the increasing complexity and scalability challenges in network protocol design and verification. Utilizing Large Language Models (LLMs), AVRE transforms protocol descriptions into dependency graphs and formal models, efficiently resolving ambiguities and capturing design intent. The system integrates a transformer model with LLMs to autonomously establish quantifiable dependency relationships through cross- and self-attention mechanisms. Enhanced by iterative feedback from the HyFuzz experimental platform, AVRE significantly advances the accuracy and relevance of formal verification in complex communication protocols, offering a groundbreaking approach to validating sophisticated communication systems. We compare CAL's performance with state-of-the-art LLM-based models and traditional time sequence models, demonstrating its superiority in accuracy and robustness, achieving an accuracy of 95.94\% and an AUC of 0.98. This NLP-based approach enables, for the first time, the creation of exploits directly from design documents, making remarkable progress in scalable system verification and validation.
From Ambiguity to Explicitness: NLP-Assisted 5G Specification Abstraction for Formal Analysis
Aug 07, 2023



Formal method-based analysis of the 5G Wireless Communication Protocol is crucial for identifying logical vulnerabilities and facilitating an all-encompassing security assessment, especially in the design phase. Natural Language Processing (NLP) assisted techniques and most of the tools are not widely adopted by the industry and research community. Traditional formal verification through a mathematics approach heavily relied on manual logical abstraction prone to being time-consuming, and error-prone. The reason that the NLP-assisted method did not apply in industrial research may be due to the ambiguity in the natural language of the protocol designs nature is controversial to the explicitness of formal verification. To address the challenge of adopting the formal methods in protocol designs, targeting (3GPP) protocols that are written in natural language, in this study, we propose a hybrid approach to streamline the analysis of protocols. We introduce a two-step pipeline that first uses NLP tools to construct data and then uses constructed data to extract identifiers and formal properties by using the NLP model. The identifiers and formal properties are further used for formal analysis. We implemented three models that take different dependencies between identifiers and formal properties as criteria. Our results of the optimal model reach valid accuracy of 39% for identifier extraction and 42% for formal properties predictions. Our work is proof of concept for an efficient procedure in performing formal analysis for largescale complicate specification and protocol analysis, especially for 5G and nextG communications.
Distributed 3D-Beam Reforming for Hovering-Tolerant UAVs Communication over Coexistence: A Deep-Q Learning for Intelligent Space-Air-Ground Integrated Networks
Jul 18, 2023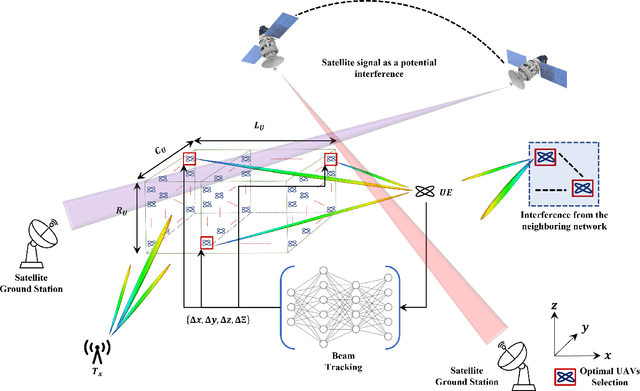
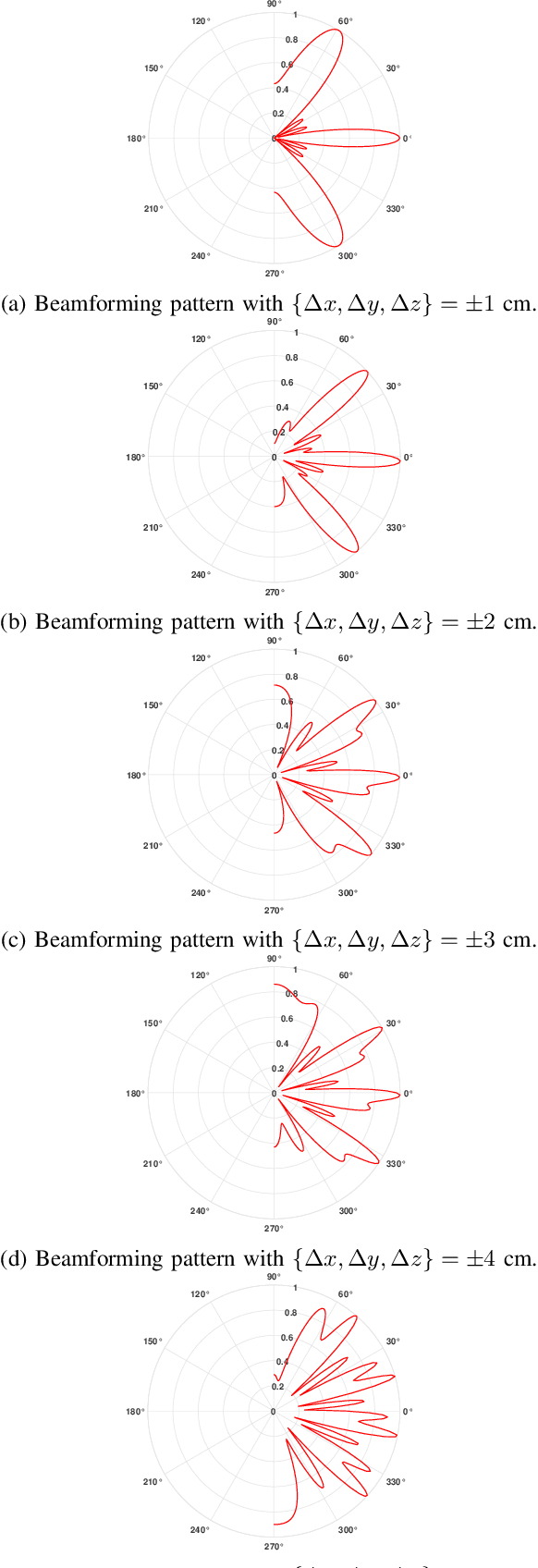
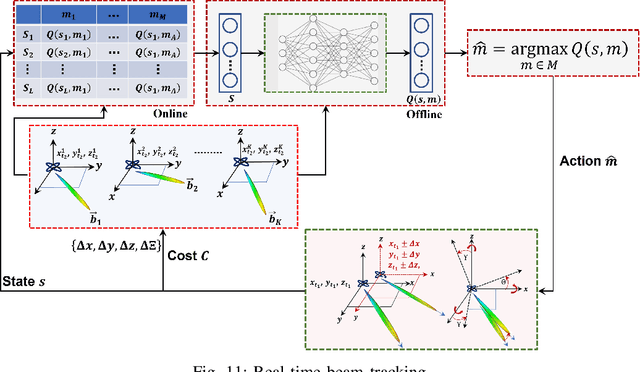
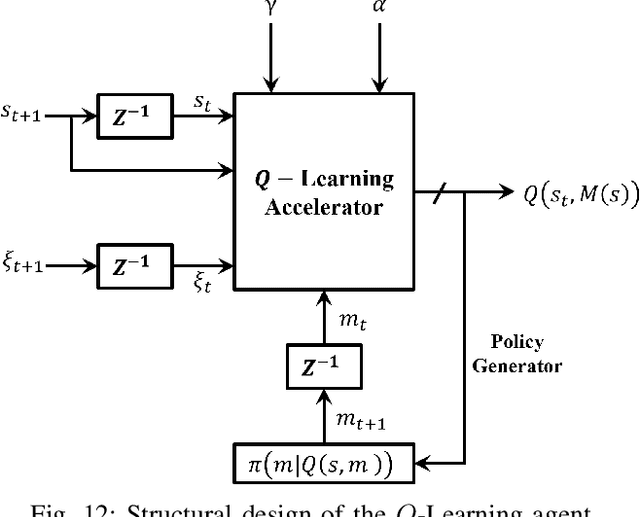
In this paper, we present a novel distributed UAVs beam reforming approach to dynamically form and reform a space-selective beam path in addressing the coexistence with satellite and terrestrial communications. Despite the unique advantage to support wider coverage in UAV-enabled cellular communications, the challenges reside in the array responses' sensitivity to random rotational motion and the hovering nature of the UAVs. A model-free reinforcement learning (RL) based unified UAV beam selection and tracking approach is presented to effectively realize the dynamic distributed and collaborative beamforming. The combined impact of the UAVs' hovering and rotational motions is considered while addressing the impairment due to the interference from the orbiting satellites and neighboring networks. The main objectives of this work are two-fold: first, to acquire the channel awareness to uncover its impairments; second, to overcome the beam distortion to meet the quality of service (QoS) requirements. To overcome the impact of the interference and to maximize the beamforming gain, we define and apply a new optimal UAV selection algorithm based on the brute force criteria. Results demonstrate that the detrimental effects of the channel fading and the interference from the orbiting satellites and neighboring networks can be overcome using the proposed approach. Subsequently, an RL algorithm based on Deep Q-Network (DQN) is developed for real-time beam tracking. By augmenting the system with the impairments due to hovering and rotational motion, we show that the proposed DQN algorithm can reform the beam in real-time with negligible error. It is demonstrated that the proposed DQN algorithm attains an exceptional performance improvement. We show that it requires a few iterations only for fine-tuning its parameters without observing any plateaus irrespective of the hovering tolerance.