 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed 3D-Beam Reforming for Hovering-Tolerant UAVs Communication over Coexistence: A Deep-Q Learning for Intelligent Space-Air-Ground Integrated Networks
Paper and Code
Jul 18, 2023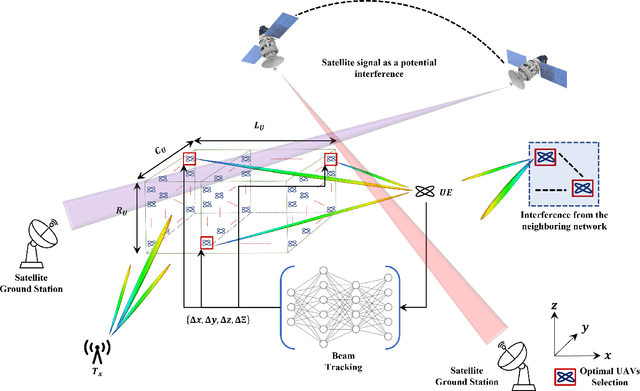
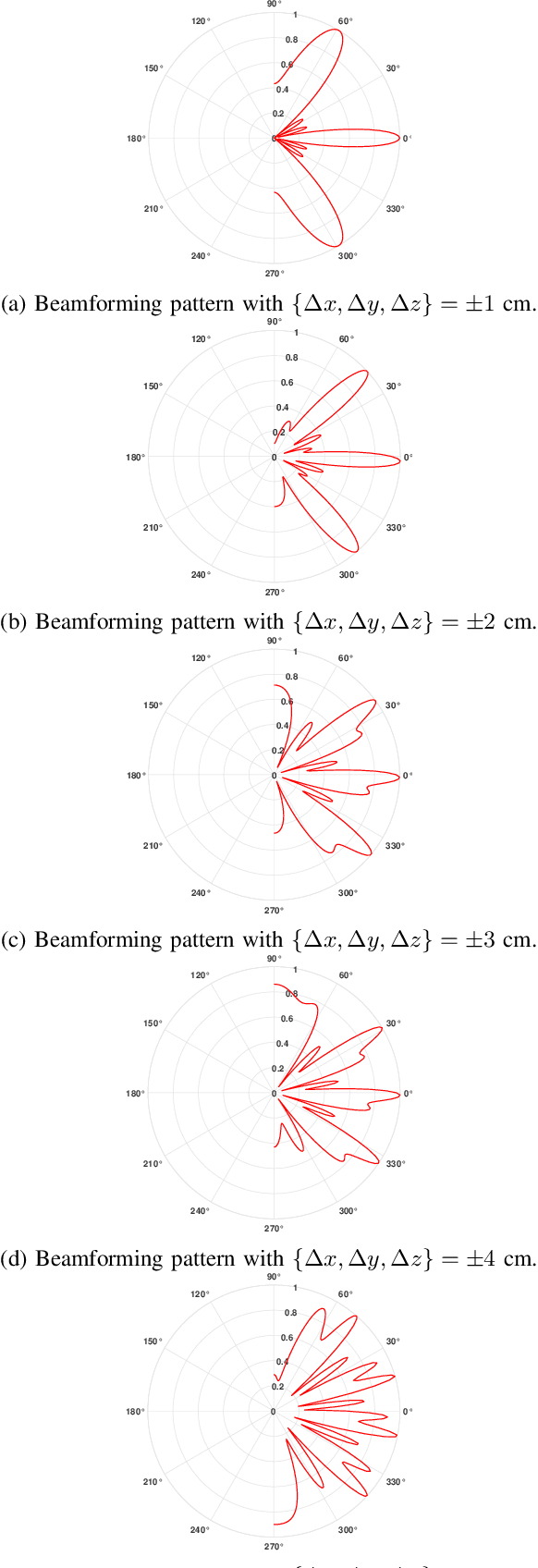
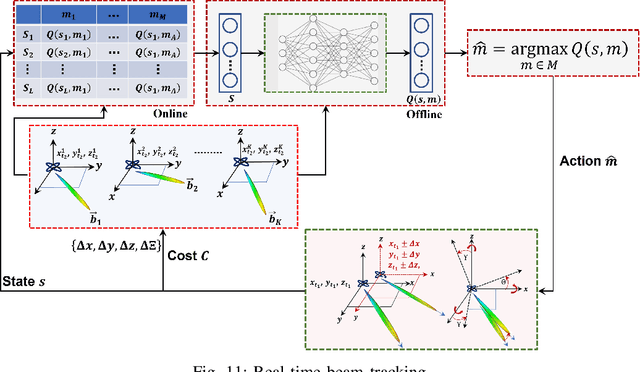
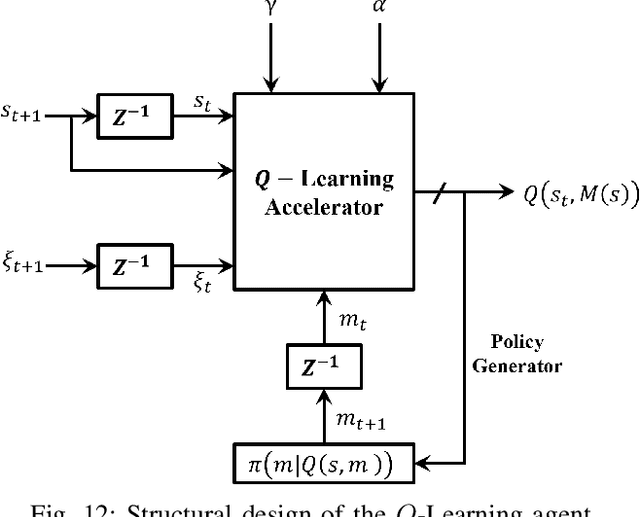
In this paper, we present a novel distributed UAVs beam reforming approach to dynamically form and reform a space-selective beam path in addressing the coexistence with satellite and terrestrial communications. Despite the unique advantage to support wider coverage in UAV-enabled cellular communications, the challenges reside in the array responses' sensitivity to random rotational motion and the hovering nature of the UAVs. A model-free reinforcement learning (RL) based unified UAV beam selection and tracking approach is presented to effectively realize the dynamic distributed and collaborative beamforming. The combined impact of the UAVs' hovering and rotational motions is considered while addressing the impairment due to the interference from the orbiting satellites and neighboring networks. The main objectives of this work are two-fold: first, to acquire the channel awareness to uncover its impairments; second, to overcome the beam distortion to meet the quality of service (QoS) requirements. To overcome the impact of the interference and to maximize the beamforming gain, we define and apply a new optimal UAV selection algorithm based on the brute force criteria. Results demonstrate that the detrimental effects of the channel fading and the interference from the orbiting satellites and neighboring networks can be overcome using the proposed approach. Subsequently, an RL algorithm based on Deep Q-Network (DQN) is developed for real-time beam tracking. By augmenting the system with the impairments due to hovering and rotational motion, we show that the proposed DQN algorithm can reform the beam in real-time with negligible error. It is demonstrated that the proposed DQN algorithm attains an exceptional performance improvement. We show that it requires a few iterations only for fine-tuning its parameters without observing any plateaus irrespective of the hovering tolerance.