 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Class Lane Semantic Segmentation using Efficient Convolutional Networks
Jul 22, 2019



Lane detection plays an important role in a self-driving vehicle. Several studies leverage a semantic segmentation network to extract robust lane features, but few of them can distinguish different types of lanes. In this paper, we focus on the problem of multi-class lane semantic segmentation. Based on the observation that the lane is a small-size and narrow-width object in a road scene image, we propose two techniques, Feature Size Selection (FSS) and Degressive Dilation Block (DD Block). The FSS allows a network to extract thin lane features using appropriate feature sizes. To acquire fine-grained spatial information, the DD Block is made of a series of dilated convolutions with degressive dilation rates. Experimental results show that the proposed techniques provide obvious improvement in accuracy, while they achieve the same or faster inference speed compared to the baseline system, and can run at real-time on high-resolution images.
DSNet: An Efficient CNN for Road Scene Segmentation
Apr 10, 2019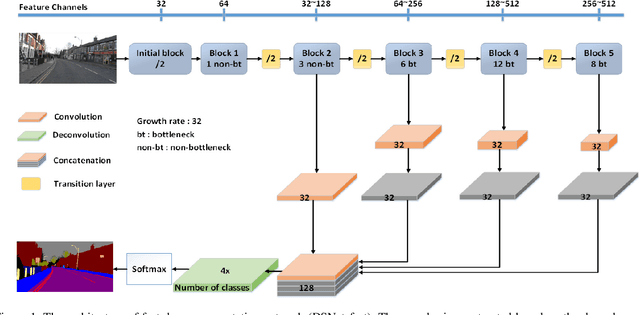
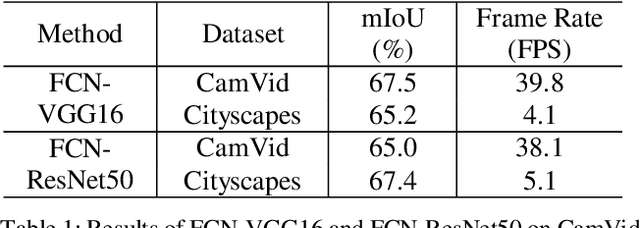
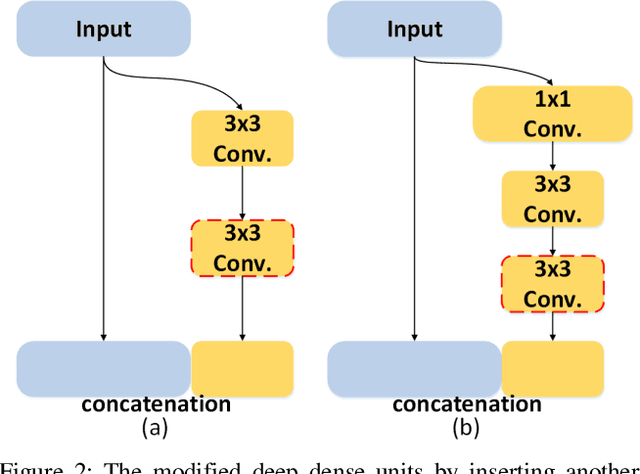
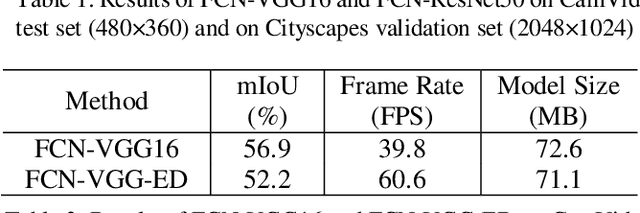
Road scene understanding is a critical component in an autonomous driving system. Although the deep learning-based road scene segmentation can achieve very high accuracy, its complexity is also very high for developing real-time applications. It is challenging to design a neural net with high accuracy and low computational complexity. To address this issue, we investigate the advantages and disadvantages of several popular CNN architectures in terms of speed, storage and segmentation accuracy. We start from the Fully Convolutional Network (FCN) with VGG, and then we study ResNet and DenseNet. Through detailed experiments, we pick up the favorable components from the existing architectures and at the end, we construct a light-weight network architecture based on the DenseNet. Our proposed network, called DSNet, demonstrates a real-time testing (inferencing) ability (on the popular GPU platform) and it maintains an accuracy comparable with most previous systems. We test our system on several datasets including the challenging Cityscapes dataset (resolution of 1024x512) with an mIoU of about 69.1 % and runtime of 0.0147 second per image on a single GTX 1080Ti. We also design a more accurate model but at the price of a slower speed, which has an mIoU of about 72.6 % on the CamVid dataset.
Efficient Dense Modules of Asymmetric Convolution for Real-Time Semantic Segmentation
Sep 17, 2018



Real-time semantic segmentation plays an important role in practical applications such as self-driving and robots. Most research working on semantic segmentation focuses on accuracy with little consideration for efficiency. Several existing studies that emphasize high-speed inference often cannot produce high-accuracy segmentation results. In this paper, we propose a novel convolutional network named Efficient Dense modules with Asymmetric convolution (EDANet), which employs an asymmetric convolution structure incorporating the dilated convolution and the dense connectivity to attain high efficiency at low computational cost, inference time, and model size. Compared to FCN, EDANet is 11 times faster and has 196 times fewer parameters, while it achieves a higher the mean of intersection-over-union (mIoU) score without any additional decoder structure, context module, post-processing scheme, and pretrained model. We evaluate EDANet on Cityscapes and CamVid datasets to evaluate its performance and compare it with the other state-of-art systems. Our network can run on resolution 512x1024 inputs at the speed of 108 and 81 frames per second on a single GTX 1080Ti and Titan X, respectively.
Efficient Road Lane Marking Detection with Deep Learning
Sep 11, 2018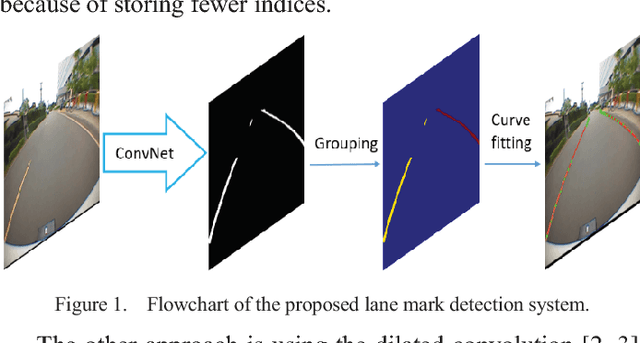
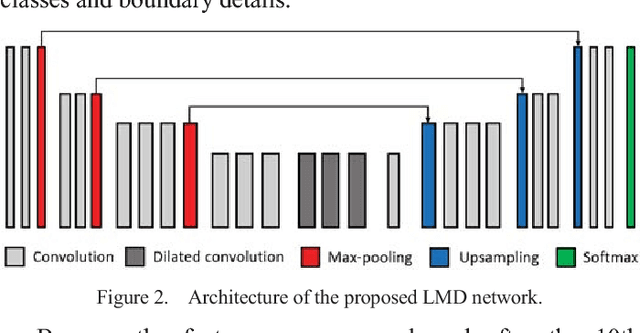
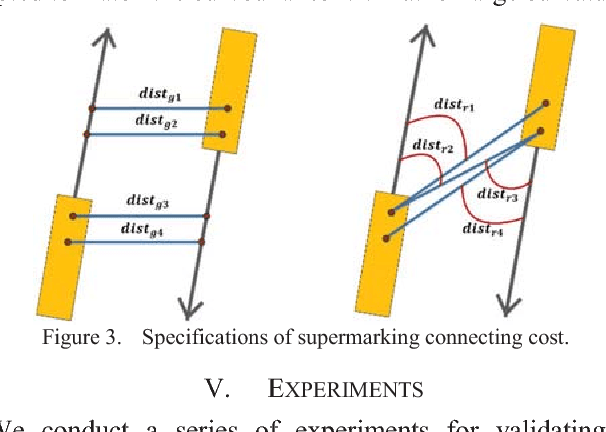
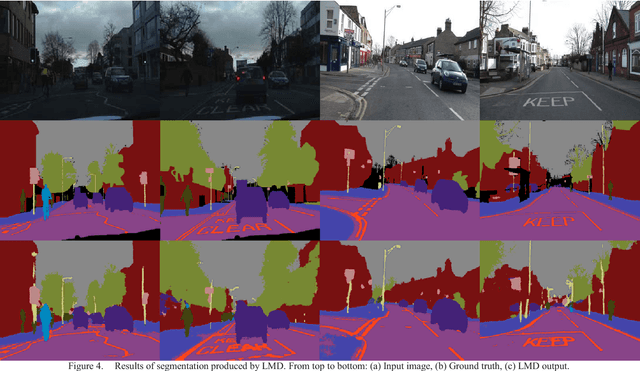
Lane mark detection is an important element in the road scene analysis for Advanced Driver Assistant System (ADAS). Limited by the onboard computing power, it is still a challenge to reduce system complexity and maintain high accuracy at the same time. In this paper, we propose a Lane Marking Detector (LMD) using a deep convolutional neural network to extract robust lane marking features. To improve its performance with a target of lower complexity, the dilated convolution is adopted. A shallower and thinner structure is designed to decrease the computational cost. Moreover, we also design post-processing algorithms to construct 3rd-order polynomial models to fit into the curved lanes. Our system shows promising results on the captured road scenes.