 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Road Lane Marking Detection with Deep Learning
Paper and Code
Sep 11, 2018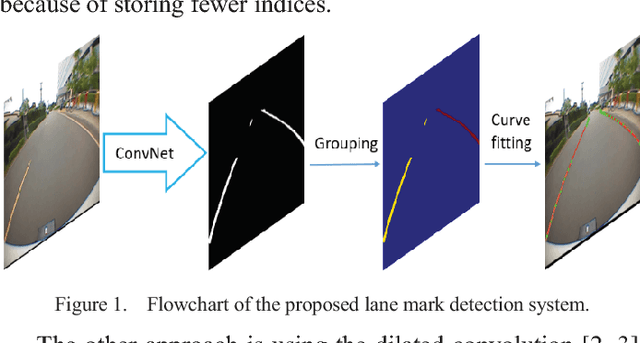
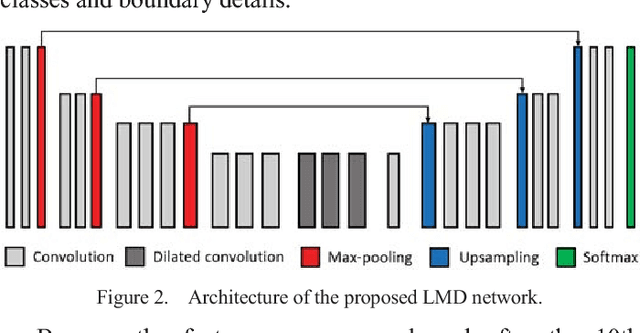
Lane mark detection is an important element in the road scene analysis for Advanced Driver Assistant System (ADAS). Limited by the onboard computing power, it is still a challenge to reduce system complexity and maintain high accuracy at the same time. In this paper, we propose a Lane Marking Detector (LMD) using a deep convolutional neural network to extract robust lane marking features. To improve its performance with a target of lower complexity, the dilated convolution is adopted. A shallower and thinner structure is designed to decrease the computational cost. Moreover, we also design post-processing algorithms to construct 3rd-order polynomial models to fit into the curved lanes. Our system shows promising results on the captured road scenes.