 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Prompting for Sensor-Agnostic Depth Estimation
May 20, 2024Dense depth maps have been used as a key element of visual perception tasks. There have been tremendous efforts to enhance the depth quality, ranging from optimization-based to learning-based methods. Despite the remarkable progress for a long time, their applicability in the real world is limited due to systematic measurement biases such as density, sensing pattern, and scan range. It is well-known that the biases make it difficult for these methods to achieve their generalization. We observe that learning a joint representation for input modalities (e.g., images and depth), which most recent methods adopt, is sensitive to the biases. In this work, we disentangle those modalities to mitigate the biases with prompt engineering. For this, we design a novel depth prompt module to allow the desirable feature representation according to new depth distributions from either sensor types or scene configurations. Our depth prompt can be embedded into foundation models for monocular depth estimation. Through this embedding process, our method helps the pretrained model to be free from restraint of depth scan range and to provide absolute scale depth maps. We demonstrate the effectiveness of our method through extensive evaluations. Source code is publicly available at https://github.com/JinhwiPark/DepthPrompting .
Learning Pedestrian Group Representations for Multi-modal Trajectory Prediction
Jul 20, 2022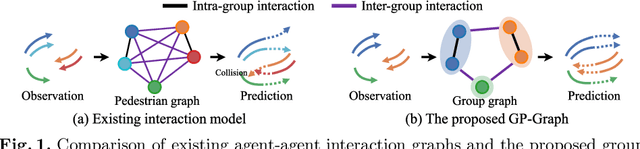
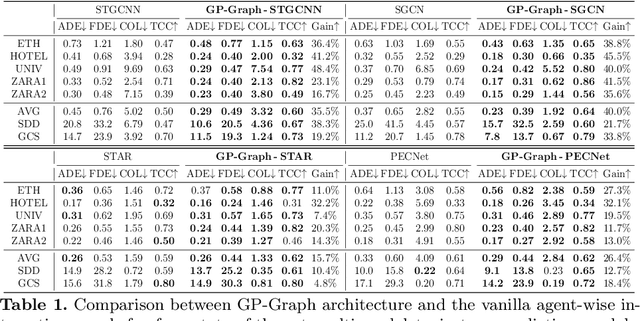
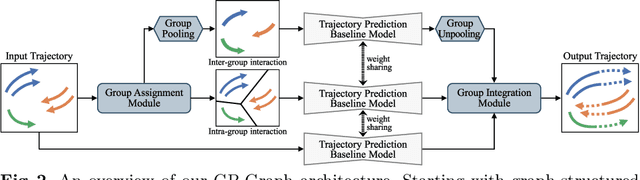

Modeling the dynamics of people walking is a problem of long-standing interest in computer vision. Many previous works involving pedestrian trajectory prediction define a particular set of individual actions to implicitly model group actions. In this paper, we present a novel architecture named GP-Graph which has collective group representations for effective pedestrian trajectory prediction in crowded environments, and is compatible with all types of existing approaches. A key idea of GP-Graph is to model both individual-wise and group-wise relations as graph representations. To do this, GP-Graph first learns to assign each pedestrian into the most likely behavior group. Using this assignment information, GP-Graph then forms both intra- and inter-group interactions as graphs, accounting for human-human relations within a group and group-group relations, respectively. To be specific, for the intra-group interaction, we mask pedestrian graph edges out of an associated group. We also propose group pooling&unpooling operations to represent a group with multiple pedestrians as one graph node. Lastly, GP-Graph infers a probability map for socially-acceptable future trajectories from the integrated features of both group interactions. Moreover, we introduce a group-level latent vector sampling to ensure collective inferences over a set of possible future trajectories. Extensive experiments are conducted to validate the effectiveness of our architecture, which demonstrates consistent performance improvements with publicly available benchmarks. Code is publicly available at https://github.com/inhwanbae/GPGraph.
Non-Probability Sampling Network for Stochastic Human Trajectory Prediction
Mar 25, 2022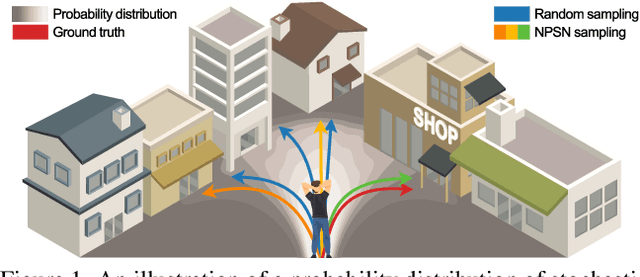
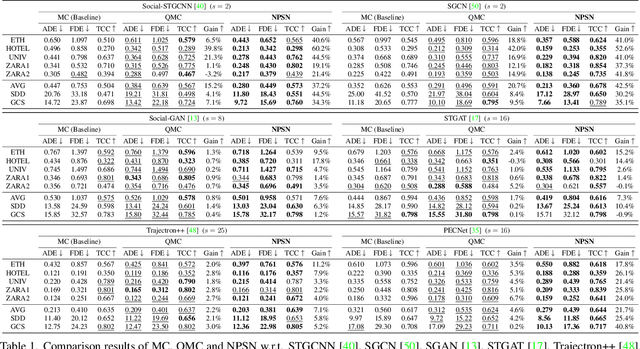
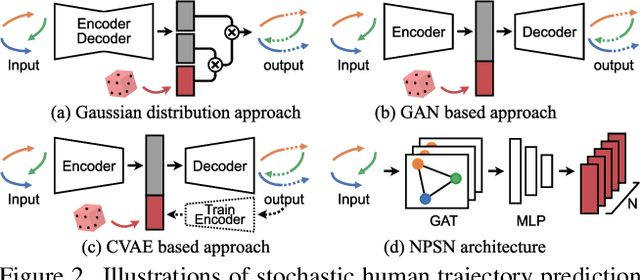
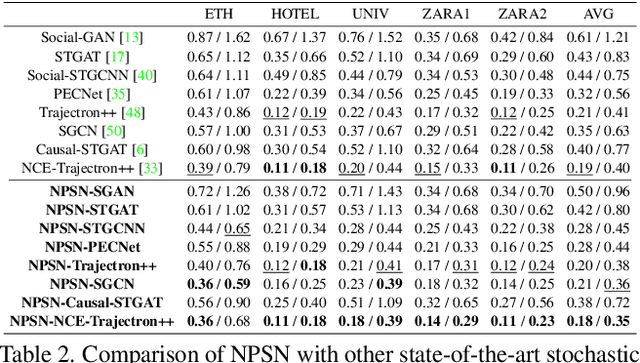
Capturing multimodal natures is essential for stochastic pedestrian trajectory prediction, to infer a finite set of future trajectories. The inferred trajectories are based on observation paths and the latent vectors of potential decisions of pedestrians in the inference step. However, stochastic approaches provide varying results for the same data and parameter settings, due to the random sampling of the latent vector. In this paper, we analyze the problem by reconstructing and comparing probabilistic distributions from prediction samples and socially-acceptable paths, respectively. Through this analysis, we observe that the inferences of all stochastic models are biased toward the random sampling, and fail to generate a set of realistic paths from finite samples. The problem cannot be resolved unless an infinite number of samples is available, which is infeasible in practice. We introduce that the Quasi-Monte Carlo (QMC) method, ensuring uniform coverage on the sampling space, as an alternative to the conventional random sampling. With the same finite number of samples, the QMC improves all the multimodal prediction results. We take an additional step ahead by incorporating a learnable sampling network into the existing networks for trajectory prediction. For this purpose, we propose the Non-Probability Sampling Network (NPSN), a very small network (~5K parameters) that generates purposive sample sequences using the past paths of pedestrians and their social interactions. Extensive experiments confirm that NPSN can significantly improve both the prediction accuracy (up to 60%) and reliability of the public pedestrian trajectory prediction benchmark. Code is publicly available at https://github.com/inhwanbae/NPSN .