 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Pedestrian Group Representations for Multi-modal Trajectory Prediction
Paper and Code
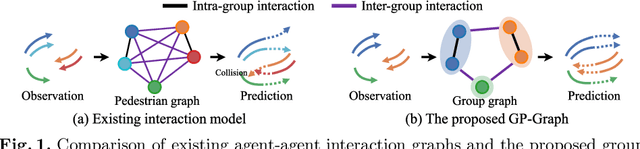
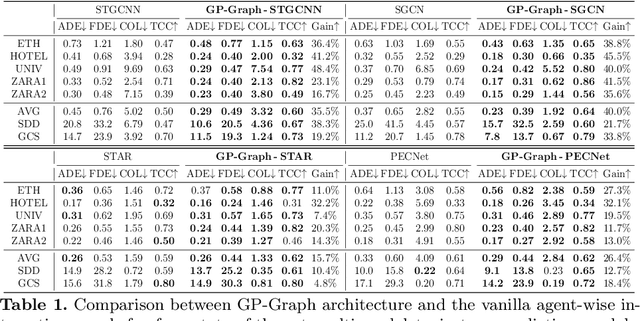
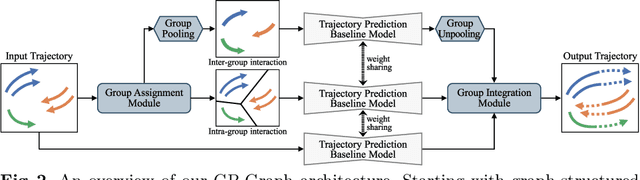

Modeling the dynamics of people walking is a problem of long-standing interest in computer vision. Many previous works involving pedestrian trajectory prediction define a particular set of individual actions to implicitly model group actions. In this paper, we present a novel architecture named GP-Graph which has collective group representations for effective pedestrian trajectory prediction in crowded environments, and is compatible with all types of existing approaches. A key idea of GP-Graph is to model both individual-wise and group-wise relations as graph representations. To do this, GP-Graph first learns to assign each pedestrian into the most likely behavior group. Using this assignment information, GP-Graph then forms both intra- and inter-group interactions as graphs, accounting for human-human relations within a group and group-group relations, respectively. To be specific, for the intra-group interaction, we mask pedestrian graph edges out of an associated group. We also propose group pooling&unpooling operations to represent a group with multiple pedestrians as one graph node. Lastly, GP-Graph infers a probability map for socially-acceptable future trajectories from the integrated features of both group interactions. Moreover, we introduce a group-level latent vector sampling to ensure collective inferences over a set of possible future trajectories. Extensive experiments are conducted to validate the effectiveness of our architecture, which demonstrates consistent performance improvements with publicly available benchmarks. Code is publicly available at https://github.com/inhwanbae/GPGraph.