 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast LiDAR Upsampling using Conditional Diffusion Models
May 08, 2024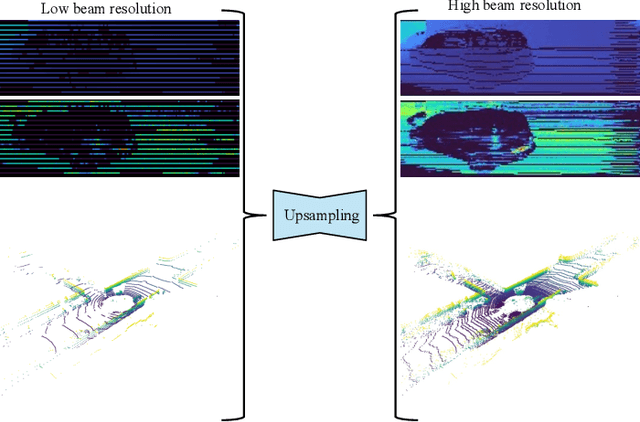
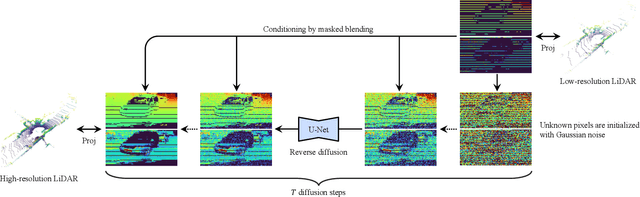
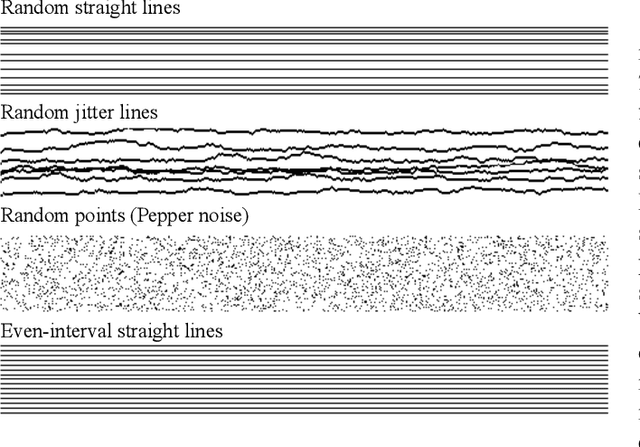
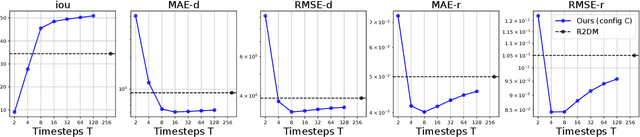
The search for refining 3D LiDAR data has attracted growing interest motivated by recent techniques such as supervised learning or generative model-based methods. Existing approaches have shown the possibilities for using diffusion models to generate refined LiDAR data with high fidelity, although the performance and speed of such methods have been limited. These limitations make it difficult to execute in real-time, causing the approaches to struggle in real-world tasks such as autonomous navigation and human-robot interaction. In this work, we introduce a novel approach based on conditional diffusion models for fast and high-quality sparse-to-dense upsampling of 3D scene point clouds through an image representation. Our method employs denoising diffusion probabilistic models trained with conditional inpainting masks, which have been shown to give high performance on image completion tasks. We introduce a series of experiments, including multiple datasets, sampling steps, and conditional masks, to determine the ideal configuration, striking a balance between performance and inference speed. This paper illustrates that our method outperforms the baselines in sampling speed and quality on upsampling tasks using the KITTI-360 dataset. Furthermore, we illustrate the generalization ability of our approach by simultaneously training on real-world and synthetic datasets, introducing variance in quality and environments.
Offline Skill Generalization via Task and Motion Planning
Nov 24, 2023



This paper presents a novel approach to generalizing robot manipulation skills by combining a sampling-based task-and-motion planner with an offline reinforcement learning algorithm. Starting with a small library of scripted primitive skills (e.g. Push) and object-centric symbolic predicates (e.g. On(block, plate)), the planner autonomously generates a demonstration dataset of manipulation skills in the context of a long-horizon task. An offline reinforcement learning algorithm then extracts a policy from the dataset without further interactions with the environment and replaces the scripted skill in the existing library. Refining the skill library improves the robustness of the planner, which in turn facilitates data collection for more complex manipulation skills. We validate our approach in simulation, on a block-pushing task. We show that the proposed method requires less training data than conventional reinforcement learning methods. Furthermore, interaction with the environment is collision-free because of the use of planner demonstrations, making the approach more amenable to persistent robot learning in the real world.
Latent Space Unsupervised Semantic Segmentation
Jul 31, 2022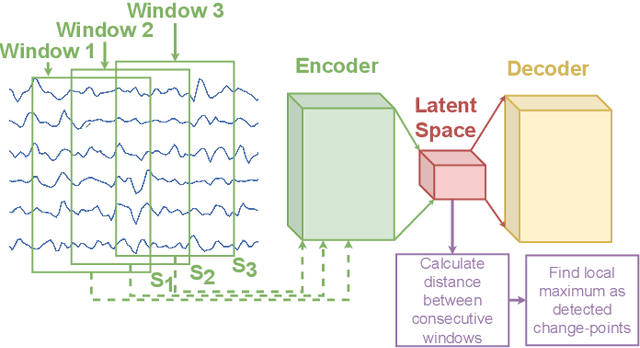
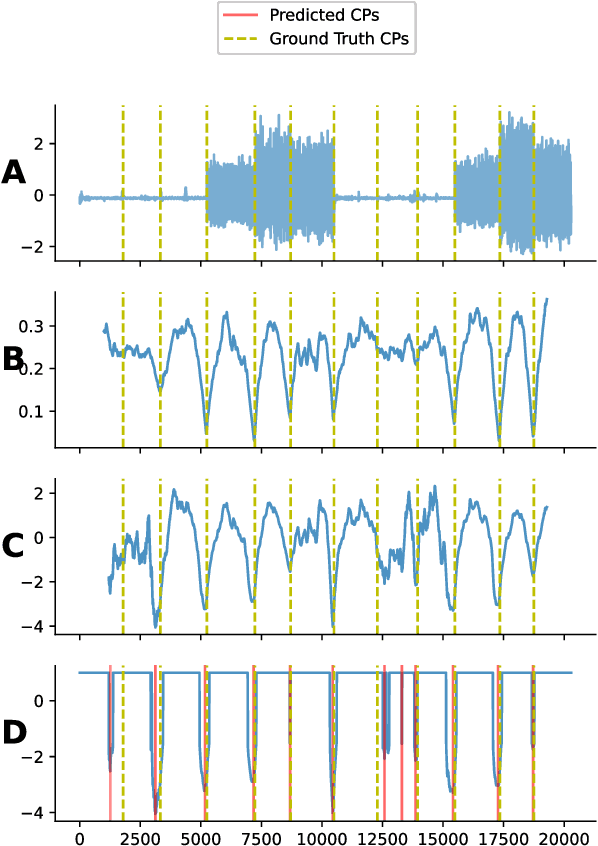
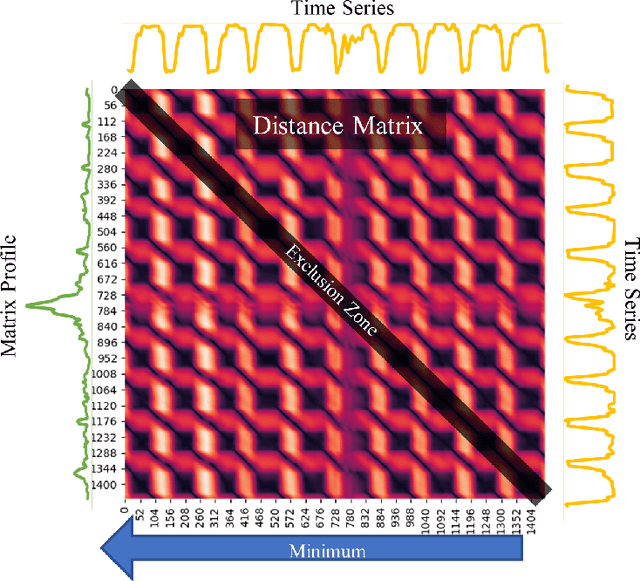
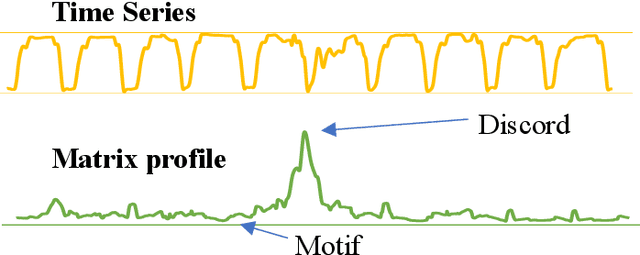
The development of compact and energy-efficient wearable sensors has led to an increase in the availability of biosignals. To analyze these continuously recorded, and often multidimensional, time series at scale, being able to conduct meaningful unsupervised data segmentation is an auspicious target. A common way to achieve this is to identify change-points within the time series as the segmentation basis. However, traditional change-point detection algorithms often come with drawbacks, limiting their real-world applicability. Notably, they generally rely on the complete time series to be available and thus cannot be used for real-time applications. Another common limitation is that they poorly (or cannot) handle the segmentation of multidimensional time series. Consequently, the main contribution of this work is to propose a novel unsupervised segmentation algorithm for multidimensional time series named Latent Space Unsupervised Semantic Segmentation (LS-USS), which was designed to work easily with both online and batch data. When comparing LS-USS against other state-of-the-art change-point detection algorithms on a variety of real-world datasets, in both the offline and real-time setting, LS-USS systematically achieves on par or better performances.
Reinforcement Learning-based Switching Controller for a Milliscale Robot in a Constrained Environment
Nov 27, 2021



This work presents a reinforcement learning-based switching control mechanism to autonomously move a ferromagnetic object (representing a milliscale robot) around obstacles within a constrained environment in the presence of disturbances. This mechanism can be used to navigate objects (e.g., capsule endoscopy, swarms of drug particles) through complex environments when active control is a necessity but where direct manipulation can be hazardous. The proposed control scheme consists of a switching control architecture implemented by two sub-controllers. The first sub-controller is designed to employs the robot's inverse kinematic solutions to do an environment search of the to-be-carried ferromagnetic particle while being robust to disturbances. The second sub-controller uses a customized rainbow algorithm to control a robotic arm, i.e., the UR5 robot, to carry a ferromagnetic particle to a desired position through a constrained environment. For the customized Rainbow algorithm, Quantile Huber loss from the Implicit Quantile Networks (IQN) algorithm and ResNet are employed. The proposed controller is first trained and tested in a real-time physics simulation engine (PyBullet). Afterward, the trained controller is transferred to a UR5 robot to remotely transport a ferromagnetic particle in a real-world scenario to demonstrate the applicability of the proposed approach. The experimental results show an average success rate of 98.86\% calculated over 30 episodes for randomly generated trajectories.