 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Spatio-Temporal Reconstruction of Dynamic Endoscopic Scenes with 4D Gaussian Splatting
Nov 02, 2024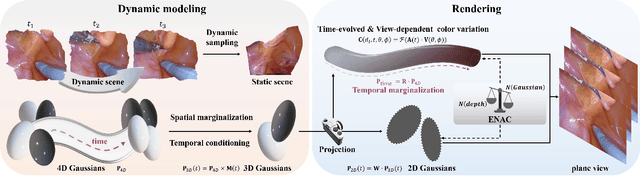


Dynamic scene reconstruction is essential in robotic minimally invasive surgery, providing crucial spatial information that enhances surgical precision and outcomes. However, existing methods struggle to address the complex, temporally dynamic nature of endoscopic scenes. This paper presents ST-Endo4DGS, a novel framework that models the spatio-temporal volume of dynamic endoscopic scenes using unbiased 4D Gaussian Splatting (4DGS) primitives, parameterized by anisotropic ellipses with flexible 4D rotations. This approach enables precise representation of deformable tissue dynamics, capturing intricate spatial and temporal correlations in real time. Additionally, we extend spherindrical harmonics to represent time-evolving appearance, achieving realistic adaptations to lighting and view changes. A new endoscopic normal alignment constraint (ENAC) further enhances geometric fidelity by aligning rendered normals with depth-derived geometry. Extensive evaluations show that ST-Endo4DGS outperforms existing methods in both visual quality and real-time performance, establishing a new state-of-the-art in dynamic scene reconstruction for endoscopic surgery.
Mirror-Yolo: An attention-based instance segmentation and detection model for mirrors
Feb 17, 2022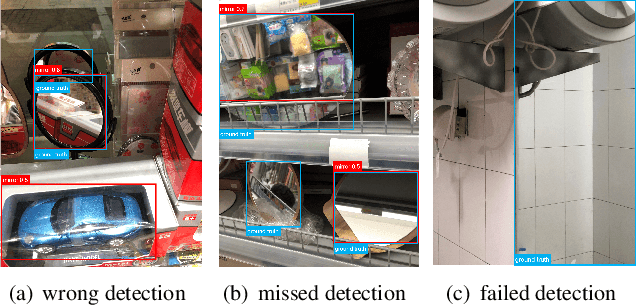
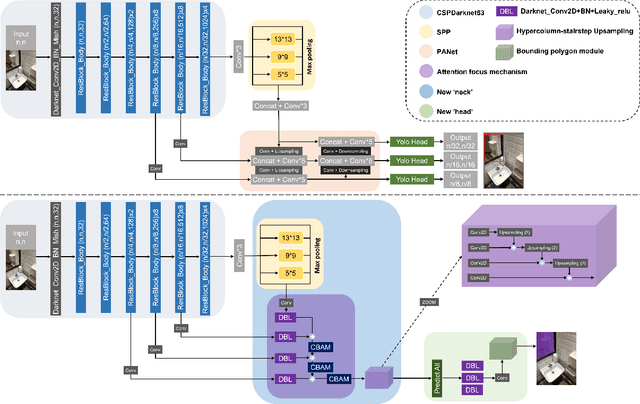
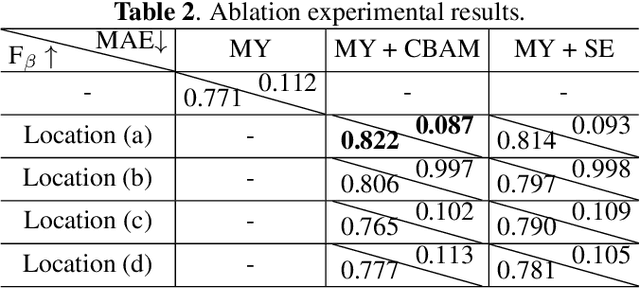
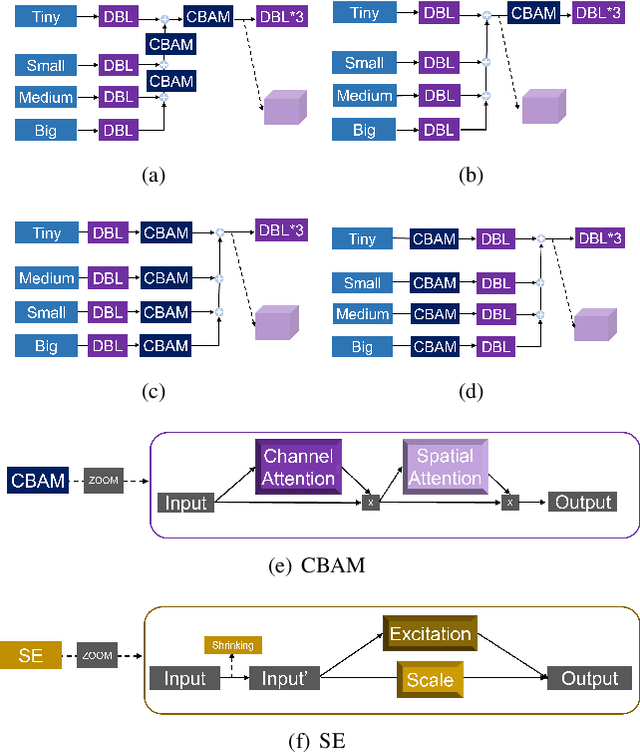
Mirrors can degrade the performance of computer vision models, however to accurately detect mirrors in images remains challenging. YOLOv4 achieves phenomenal results both in object detection accuracy and speed, nevertheless the model often fails in detecting mirrors. In this paper, a novel mirror detection method `Mirror-YOLO' is proposed, which mainly targets on mirror detection. Based on YOLOv4, the proposed model embeds an attention mechanism for better feature acquisition, and a hypercolumn-stairstep approach for feature map fusion. Mirror-YOLO can also produce accurate bounding polygons for instance segmentation. The effectiveness of our proposed model is demonstrated by our experiments, compared to the existing mirror detection methods, the proposed Mirror-YOLO achieves better performance in detection accuracy on the mirror image dataset.