 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Spatio-Temporal Reconstruction of Dynamic Endoscopic Scenes with 4D Gaussian Splatting
Nov 02, 2024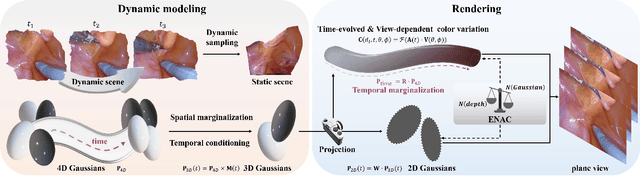


Dynamic scene reconstruction is essential in robotic minimally invasive surgery, providing crucial spatial information that enhances surgical precision and outcomes. However, existing methods struggle to address the complex, temporally dynamic nature of endoscopic scenes. This paper presents ST-Endo4DGS, a novel framework that models the spatio-temporal volume of dynamic endoscopic scenes using unbiased 4D Gaussian Splatting (4DGS) primitives, parameterized by anisotropic ellipses with flexible 4D rotations. This approach enables precise representation of deformable tissue dynamics, capturing intricate spatial and temporal correlations in real time. Additionally, we extend spherindrical harmonics to represent time-evolving appearance, achieving realistic adaptations to lighting and view changes. A new endoscopic normal alignment constraint (ENAC) further enhances geometric fidelity by aligning rendered normals with depth-derived geometry. Extensive evaluations show that ST-Endo4DGS outperforms existing methods in both visual quality and real-time performance, establishing a new state-of-the-art in dynamic scene reconstruction for endoscopic surgery.