 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteger-Programming-Based Narrow-Passage Multi-Robot Path Planning with Effective Heuristics
Jul 26, 2021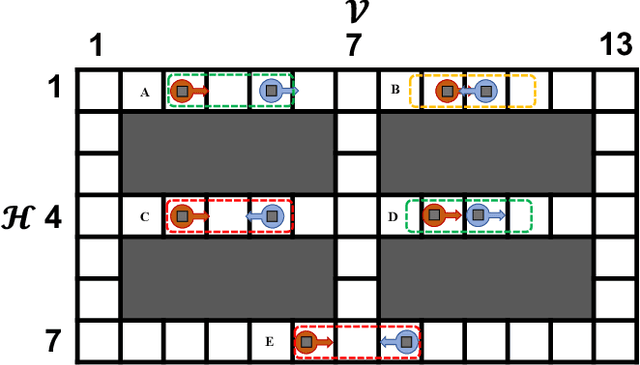
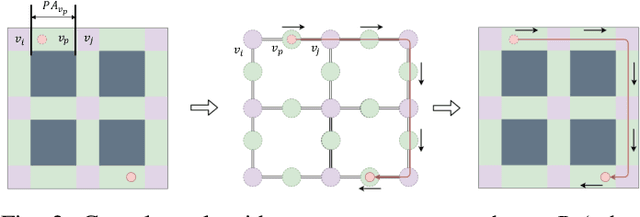
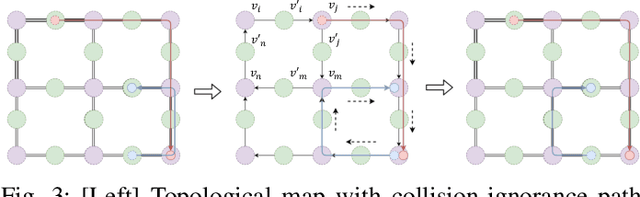
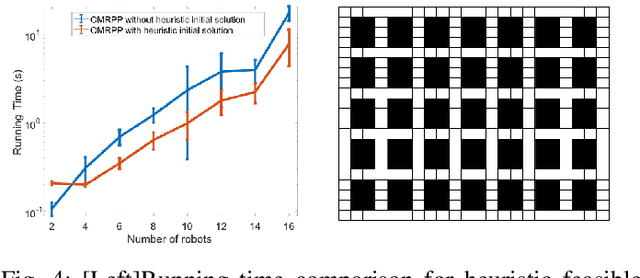
We study optimal Multi-robot Path Planning (MPP) on graphs, in order to improve the efficiency of multi-robot system (MRS) in the warehouse-like environment. We propose a novel algorithm, OMRPP (One-way Multi-robot Path Planning) based on Integer programming (IP) method. We focus on reducing the cost caused by a set of robots moving from their initial configuration to goal configuration in the warehouse-like environment. The novelty of this work includes: (1) proposing a topological map extraction based on the property of warehouse-like environment to reduce the scale of constructed IP model; (2) proposing one-way passage constraint to prevent the robots from having unsolvable collisions in the passage. (3) developing a heuristic architecture that IP model can always have feasible initial solution to ensure its solvability. Numerous simulations demonstrate the efficiency and performance of the proposed algorithm.