 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWS-3D-Lane: Weakly Supervised 3D Lane Detection With 2D Lane Labels
Sep 23, 2022
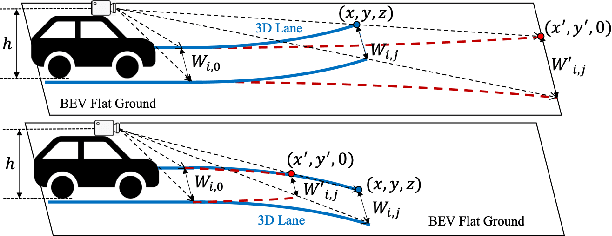
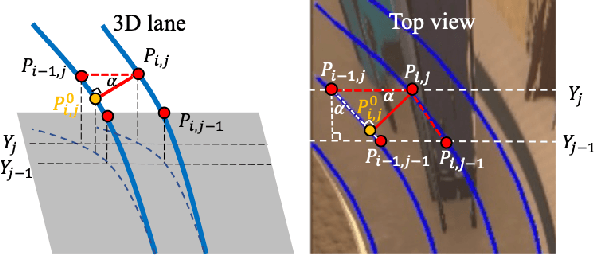

Compared to 2D lanes, real 3D lane data is difficult to collect accurately. In this paper, we propose a novel method for training 3D lanes with only 2D lane labels, called weakly supervised 3D lane detection WS-3D-Lane. By assumptions of constant lane width and equal height on adjacent lanes, we indirectly supervise 3D lane heights in the training. To overcome the problem of the dynamic change of the camera pitch during data collection, a camera pitch self-calibration method is proposed. In anchor representation, we propose a double-layer anchor with a improved non-maximum suppression (NMS) method, which enables the anchor-based method to predict two lane lines that are close. Experiments are conducted on the base of 3D-LaneNet under two supervision methods. Under weakly supervised setting, our WS-3D-Lane outperforms previous 3D-LaneNet: F-score rises to 92.3% on Apollo 3D synthetic dataset, and F1 rises to 74.5% on ONCE-3DLanes. Meanwhile, WS-3D-Lane in purely supervised setting makes more increments and outperforms state-of-the-art. To the best of our knowledge, WS-3D-Lane is the first try of 3D lane detection under weakly supervised setting.