 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEgoRelight: Egocentric Human Capture and Illumination Recovery for Relightable and Photoreal Avatar Rendering
May 27, 2026Mixed Reality (MR) headsets promise a future of immersive telepresence where virtual humans blend indistinguishably into real or virtual surroundings. Achieving this vision requires a method for capturing a user's motion, estimating appearance under novel lighting, and understanding the environment - all from the constrained viewpoint of a head-mounted display (HMD). Existing approaches treat these as isolated problems: they either focus on driving avatars with baked-in lighting or rely on studio setups for relighting. In this paper, we present EgoRelight, a holistic framework for egocentric telepresence that simultaneously captures full-body human performance, synthesizes photorealistic and relightable appearance, and estimates high dynamic range (HDR) environment maps from a single HMD. First, to ensure motion and surface reconstruction, we propose an egocentric perception module that leverages stereo down-facing cameras to extract dense depth maps, which serve as geometric control signals to drive a mesh-based avatar. Second, we introduce a novel neural appearance model that learns to synthesize view-dependent specular and view-independent diffuse shading separately. By employing a specialized ray-sampling strategy, our model generalizes to unseen illumination without relying on restrictive analytical BRDF priors. Third, we enable seamless avatar integration into the physical world via a test-time inverse rendering process, which recovers an HDR environment map by matching the pre-trained avatar's appearance to live egocentric camera observations. We demonstrate our system through a social telepresence application, where remote users are coherently relit according to their physical environment. Extensive experiments show that our components and the integrated system significantly outperform state-of-the-art baselines in geometric accuracy and rendering as well as relighting fidelity.
Robust Image Matching By Dynamic Feature Selection
Aug 13, 2020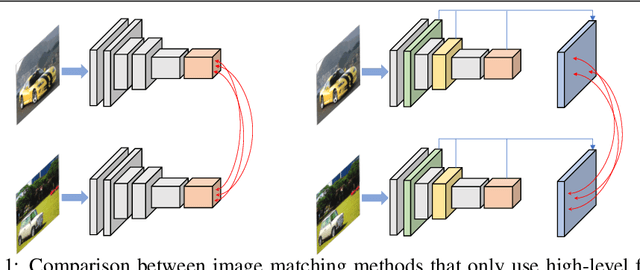
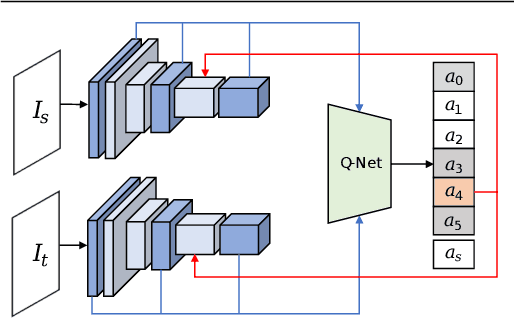
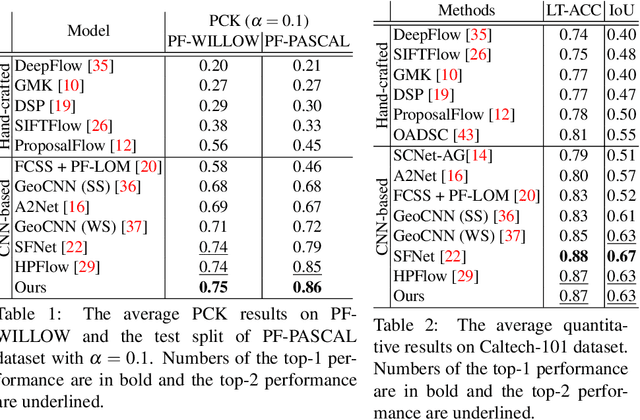
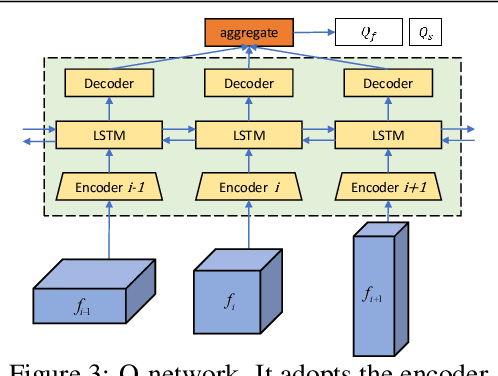
Estimating dense correspondences between images is a long-standing image under-standing task. Recent works introduce convolutional neural networks (CNNs) to extract high-level feature maps and find correspondences through feature matching. However,high-level feature maps are in low spatial resolution and therefore insufficient to provide accurate and fine-grained features to distinguish intra-class variations for correspondence matching. To address this problem, we generate robust features by dynamically selecting features at different scales. To resolve two critical issues in feature selection,i.e.,how many and which scales of features to be selected, we frame the feature selection process as a sequential Markov decision-making process (MDP) and introduce an optimal selection strategy using reinforcement learning (RL). We define an RL environment for image matching in which each individual action either requires new features or terminates the selection episode by referring a matching score. Deep neural networks are incorporated into our method and trained for decision making. Experimental results show that our method achieves comparable/superior performance with state-of-the-art methods on three benchmarks, demonstrating the effectiveness of our feature selection strategy.
Coherent Point Drift Networks: Unsupervised Learning of Non-Rigid Point Set Registration
Jul 14, 2019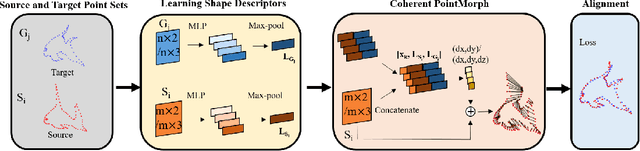

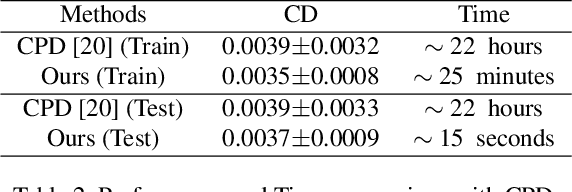
Given new pairs of source and target point sets, standard point set registration methods often repeatedly conduct the independent iterative search of desired geometric transformation to align the source point set with the target one. This limits their use in applications to handle the real-time point set registration with large volume dataset. This paper presents a novel method, named coherent point drift networks (CPD-Net), for the unsupervised learning of geometric transformation towards real-time non-rigid point set registration. In contrast to previous efforts (e.g. coherent point drift), CPD-Net can learn displacement field function to estimate geometric transformation from a training dataset, consequently, to predict the desired geometric transformation for the alignment of previously unseen pairs without any additional iterative optimization process. Furthermore, CPD-Net leverages the power of deep neural networks to fit an arbitrary function, that adaptively accommodates different levels of complexity of the desired geometric transformation. Particularly, CPD-Net is proved with a theoretical guarantee to learn a continuous displacement vector function that could further avoid imposing additional parametric smoothness constraint as in previous works. Our experiments verify the impressive performance of CPD-Net for non-rigid point set registration on various 2D/3D datasets, even in the presence of significant displacement noise, outliers, and missing points. Our code will be available at https://github.com/nyummvc/CPD-Net.
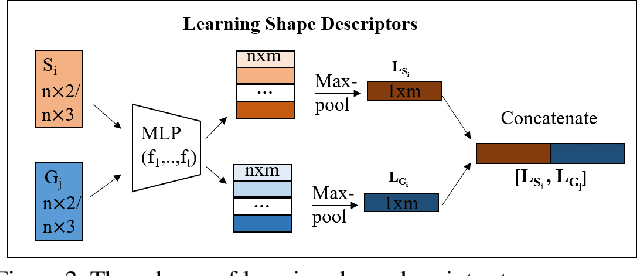
Non-Rigid Point Set Registration Networks
Apr 02, 2019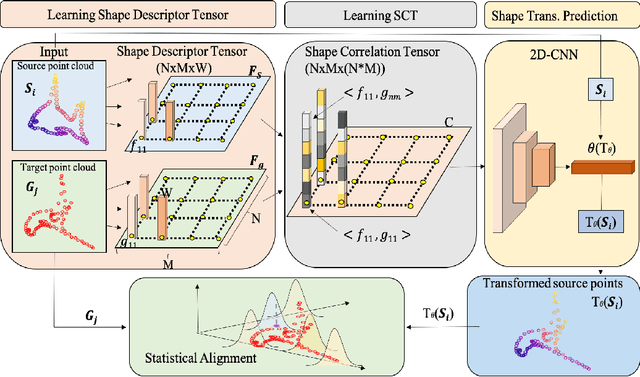
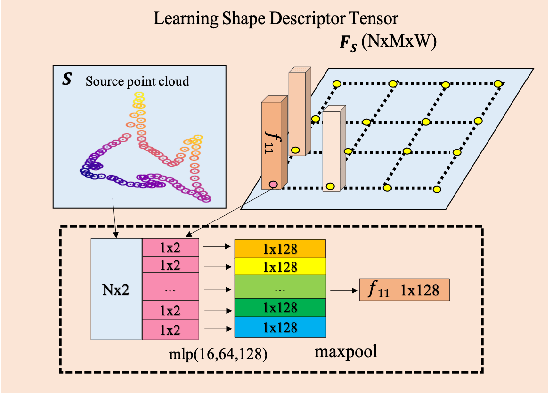
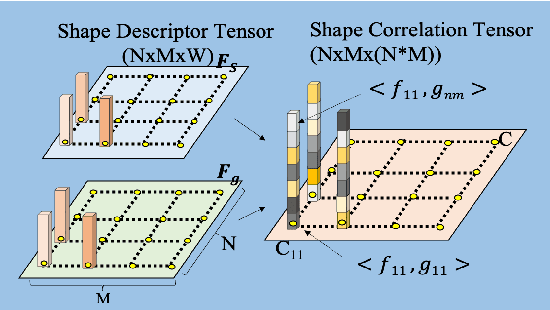
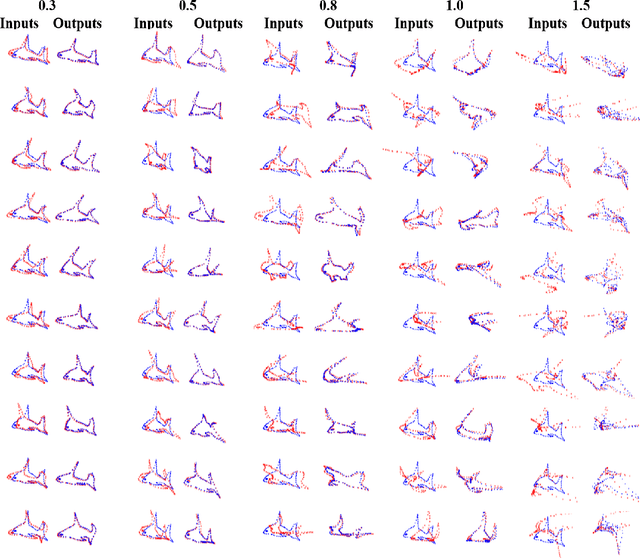
Point set registration is defined as a process to determine the spatial transformation from the source point set to the target one. Existing methods often iteratively search for the optimal geometric transformation to register a given pair of point sets, driven by minimizing a predefined alignment loss function. In contrast, the proposed point registration neural network (PR-Net) actively learns the registration pattern as a parametric function from a training dataset, consequently predict the desired geometric transformation to align a pair of point sets. PR-Net can transfer the learned knowledge (i.e. registration pattern) from registering training pairs to testing ones without additional iterative optimization. Specifically, in this paper, we develop novel techniques to learn shape descriptors from point sets that help formulate a clear correlation between source and target point sets. With the defined correlation, PR-Net tends to predict the transformation so that the source and target point sets can be statistically aligned, which in turn leads to an optimal spatial geometric registration. PR-Net achieves robust and superior performance for non-rigid registration of point sets, even in presence of Gaussian noise, outliers, and missing points, but requires much less time for registering large number of pairs. More importantly, for a new pair of point sets, PR-Net is able to directly predict the desired transformation using the learned model without repetitive iterative optimization routine. Our code is available at https://github.com/Lingjing324/PR-Net.