 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOMGs: A multi-agent system supporting MDT decision-making across the ovarian tumour care continuum
Feb 14, 2026Ovarian tumour management has increasingly relied on multidisciplinary tumour board (MDT) deliberation to address treatment complexity and disease heterogeneity. However, most patients worldwide lack access to timely expert consensus, particularly in resource-constrained centres where MDT resources are scarce or unavailable. Here we present OMGs (Ovarian tumour Multidisciplinary intelligent aGent System), a multi-agent AI framework where domain-specific agents deliberate collaboratively to integrate multidisciplinary evidence and generate MDT-style recommendations with transparent rationales. To systematically evaluate MDT recommendation quality, we developed SPEAR (Safety, Personalization, Evidence, Actionability, Robustness) and validated OMGs across diverse clinical scenarios spanning the care continuum. In multicentre re-evaluation, OMGs achieved performance comparable to expert MDT consensus ($4.45 \pm 0.30$ versus $4.53 \pm 0.23$), with higher Evidence scores (4.57 versus 3.92). In prospective multicentre evaluation (59 patients), OMGs demonstrated high concordance with routine MDT decisions. Critically, in paired human-AI studies, OMGs most substantially enhanced clinicians' recommendations in Evidence and Robustness, the dimensions most compromised when multidisciplinary expertise is unavailable. These findings suggest that multi-agent deliberative systems can achieve performance comparable to expert MDT consensus, with potential to expand access to specialized oncology expertise in resource-limited settings.
LHMap-loc: Cross-Modal Monocular Localization Using LiDAR Point Cloud Heat Map
Mar 11, 2024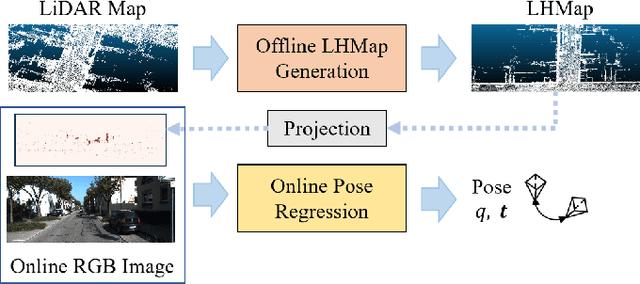
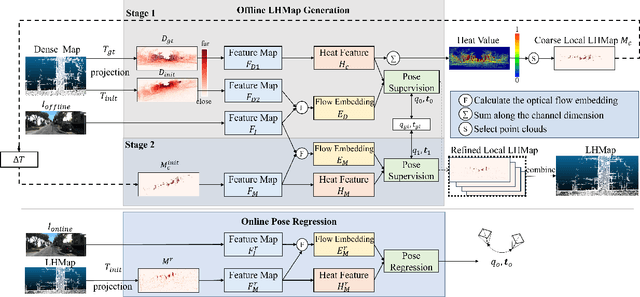
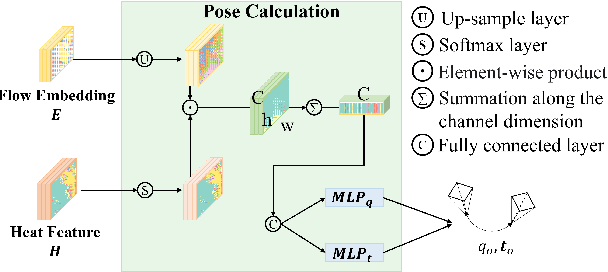
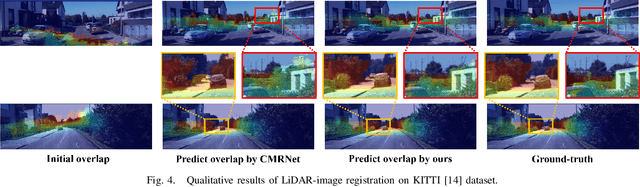
Localization using a monocular camera in the pre-built LiDAR point cloud map has drawn increasing attention in the field of autonomous driving and mobile robotics. However, there are still many challenges (e.g. difficulties of map storage, poor localization robustness in large scenes) in accurately and efficiently implementing cross-modal localization. To solve these problems, a novel pipeline termed LHMap-loc is proposed, which achieves accurate and efficient monocular localization in LiDAR maps. Firstly, feature encoding is carried out on the original LiDAR point cloud map by generating offline heat point clouds, by which the size of the original LiDAR map is compressed. Then, an end-to-end online pose regression network is designed based on optical flow estimation and spatial attention to achieve real-time monocular visual localization in a pre-built map. In addition, a series of experiments have been conducted to prove the effectiveness of the proposed method. Our code is available at: https://github.com/IRMVLab/LHMap-loc.
Learning to Predict Charges for Criminal Cases with Legal Basis
Jul 28, 2017
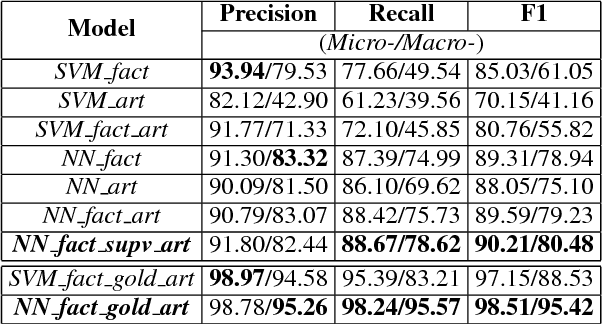
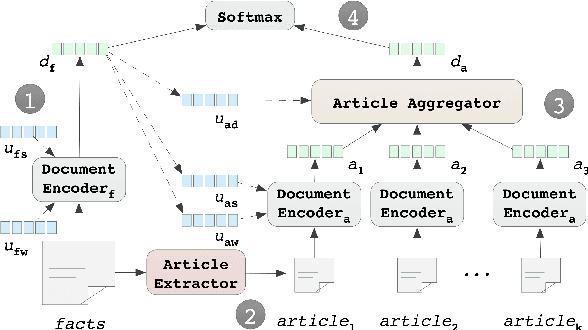
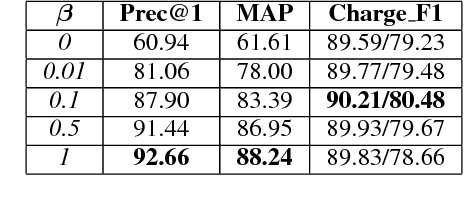
The charge prediction task is to determine appropriate charges for a given case, which is helpful for legal assistant systems where the user input is fact description. We argue that relevant law articles play an important role in this task, and therefore propose an attention-based neural network method to jointly model the charge prediction task and the relevant article extraction task in a unified framework. The experimental results show that, besides providing legal basis, the relevant articles can also clearly improve the charge prediction results, and our full model can effectively predict appropriate charges for cases with different expression styles.