 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Multi-Robot Obstacle Avoidance via Logarithmic Map-based Deep Reinforcement Learning
Sep 14, 2022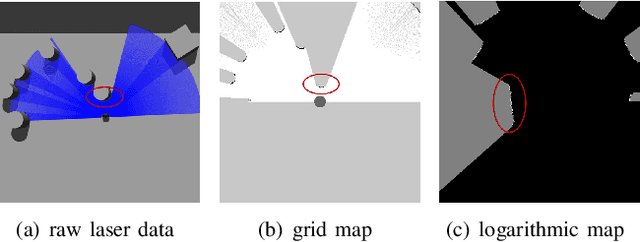

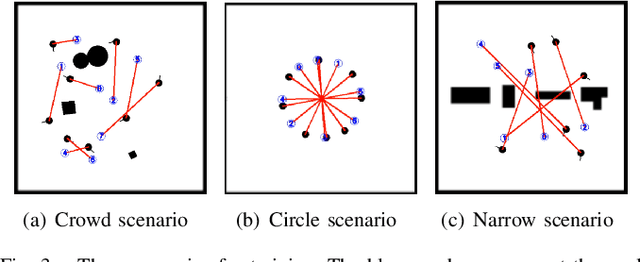
Developing a safe, stable, and efficient obstacle avoidance policy in crowded and narrow scenarios for multiple robots is challenging. Most existing studies either use centralized control or need communication with other robots. In this paper, we propose a novel logarithmic map-based deep reinforcement learning method for obstacle avoidance in complex and communication-free multi-robot scenarios. In particular, our method converts laser information into a logarithmic map. As a step toward improving training speed and generalization performance, our policies will be trained in two specially designed multi-robot scenarios. Compared to other methods, the logarithmic map can represent obstacles more accurately and improve the success rate of obstacle avoidance. We finally evaluate our approach under a variety of simulation and real-world scenarios. The results show that our method provides a more stable and effective navigation solution for robots in complex multi-robot scenarios and pedestrian scenarios. Videos are available at https://youtu.be/r0EsUXe6MZE.