 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robotic System with Optical Coherence Tomography Guidance for Vascular Anastomosis
Oct 10, 2024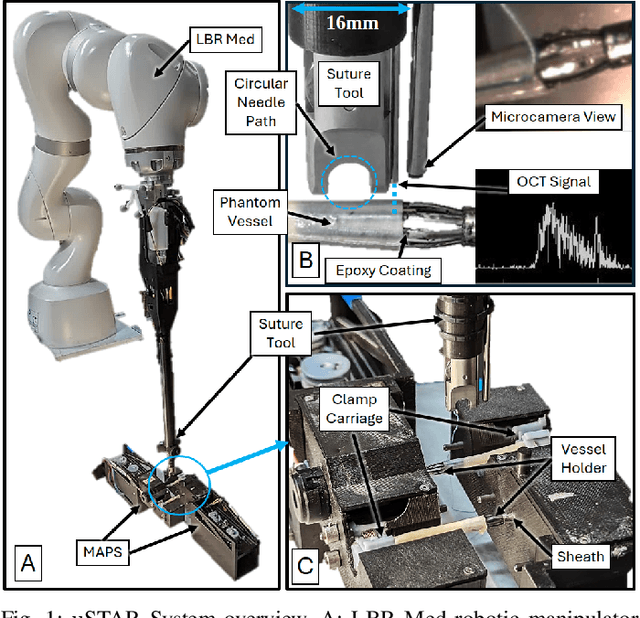
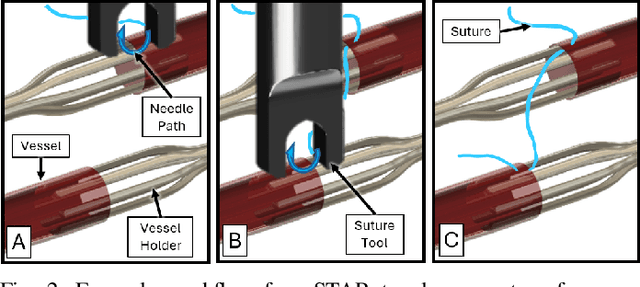
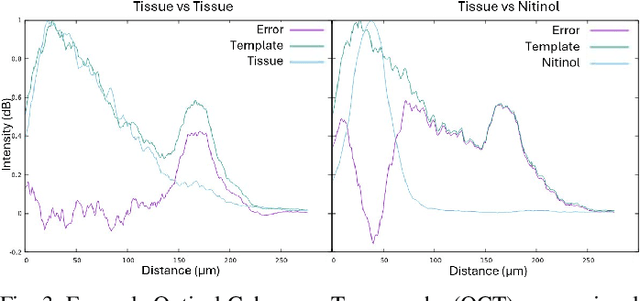
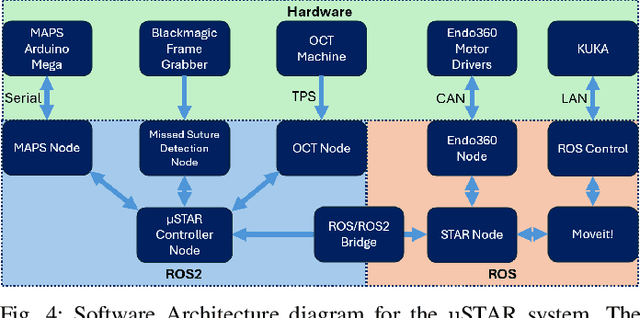
Vascular anastomosis, the surgical connection of blood vessels, is essential in procedures such as organ transplants and reconstructive surgeries. The precision required limits accessibility due to the extensive training needed, with manual suturing leading to variable outcomes and revision rates up to 7.9%. Existing robotic systems, while promising, are either fully teleoperated or lack the capabilities necessary for autonomous vascular anastomosis. We present the Micro Smart Tissue Autonomous Robot (micro-STAR), an autonomous robotic system designed to perform vascular anastomosis on small-diameter vessels. The micro-STAR system integrates a novel suturing tool equipped with Optical Coherence Tomography (OCT) fiber-optic sensor and a microcamera, enabling real-time tissue detection and classification. Our system autonomously places sutures and manipulates tissue with minimal human intervention. In an ex vivo study, micro-STAR achieved outcomes competitive with experienced surgeons in terms of leak pressure, lumen reduction, and suture placement variation, completing 90% of sutures without human intervention. This represents the first instance of a robotic system autonomously performing vascular anastomosis on real tissue, offering significant potential for improving surgical precision and expanding access to high-quality care.