 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Mitigation of Agent Inattention in Drivers with Open-Quantum Cognition Models
Jul 21, 2021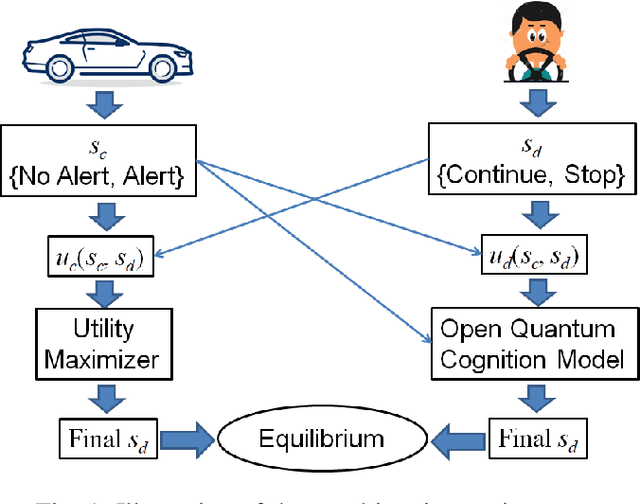
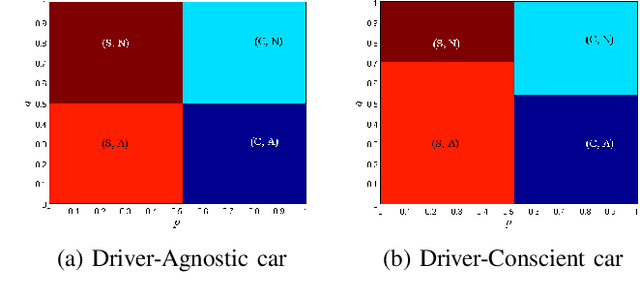
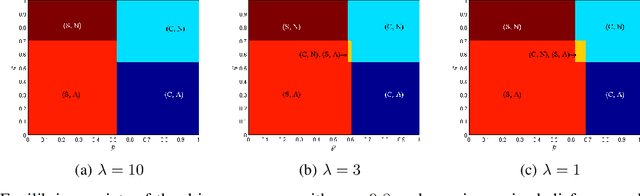

State-of-the-art driver-assist systems have failed to effectively mitigate driver inattention and had minimal impacts on the ever-growing number of road mishaps (e.g. life loss, physical injuries due to accidents caused by various factors that lead to driver inattention). This is because traditional human-machine interaction settings are modeled in classical and behavioral game-theoretic domains which are technically appropriate to characterize strategic interaction between either two utility maximizing agents, or human decision makers. Therefore, in an attempt to improve the persuasive effectiveness of driver-assist systems, we develop a novel strategic and personalized driver-assist system which adapts to the driver's mental state and choice behavior. First, we propose a novel equilibrium notion in human-system interaction games, where the system maximizes its expected utility and human decisions can be characterized using any general decision model. Then we use this novel equilibrium notion to investigate the strategic driver-vehicle interaction game where the car presents a persuasive recommendation to steer the driver towards safer driving decisions. We assume that the driver employs an open-quantum system cognition model, which captures complex aspects of human decision making such as violations to classical law of total probability and incompatibility of certain mental representations of information. We present closed-form expressions for players' final responses to each other's strategies so that we can numerically compute both pure and mixed equilibria. Numerical results are presented to illustrate both kinds of equilibria.
The detour problem in a stochastic environment: Tolman revisited
Sep 27, 2017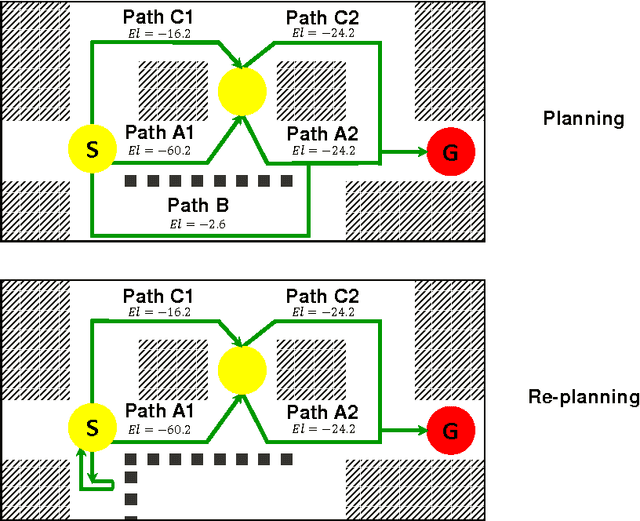
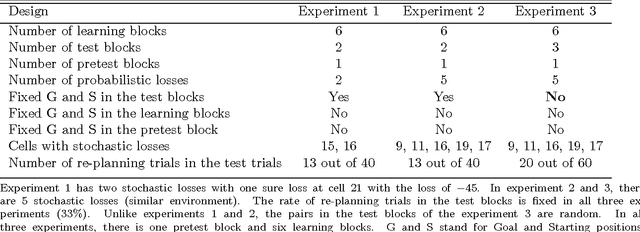
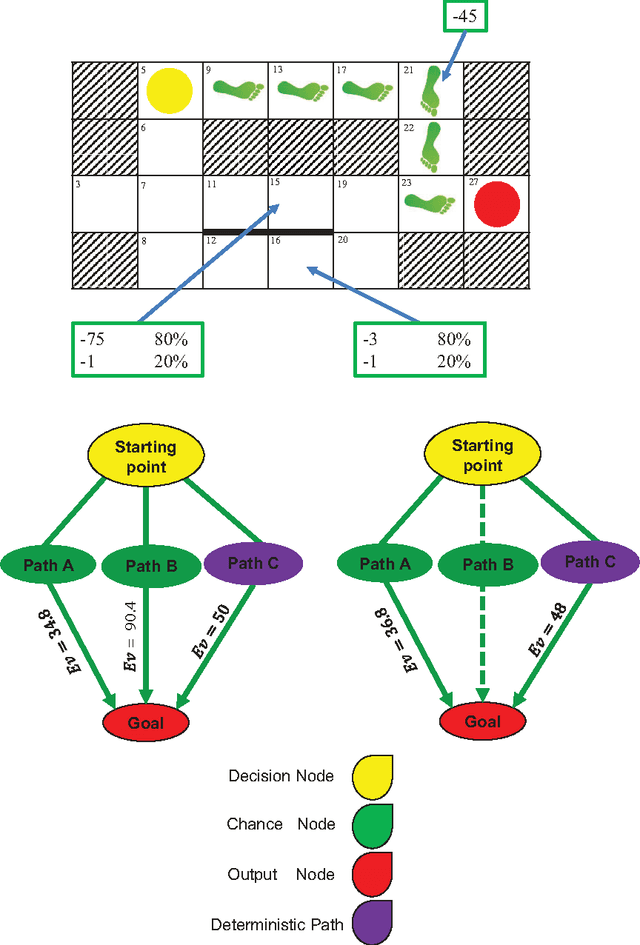
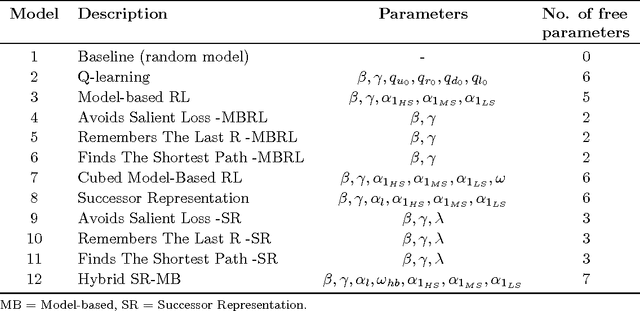
We designed a grid world task to study human planning and re-planning behavior in an unknown stochastic environment. In our grid world, participants were asked to travel from a random starting point to a random goal position while maximizing their reward. Because they were not familiar with the environment, they needed to learn its characteristics from experience to plan optimally. Later in the task, we randomly blocked the optimal path to investigate whether and how people adjust their original plans to find a detour. To this end, we developed and compared 12 different models. These models were different on how they learned and represented the environment and how they planned to catch the goal. The majority of our participants were able to plan optimally. We also showed that people were capable of revising their plans when an unexpected event occurred. The result from the model comparison showed that the model-based reinforcement learning approach provided the best account for the data and outperformed heuristics in explaining the behavioral data in the re-planning trials.