 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Occurrence-based Parking Space Detection
Jun 16, 2023Smart-parking solutions use sensors, cameras, and data analysis to improve parking efficiency and reduce traffic congestion. Computer vision-based methods have been used extensively in recent years to tackle the problem of parking lot management, but most of the works assume that the parking spots are manually labeled, impacting the cost and feasibility of deployment. To fill this gap, this work presents an automatic parking space detection method, which receives a sequence of images of a parking lot and returns a list of coordinates identifying the detected parking spaces. The proposed method employs instance segmentation to identify cars and, using vehicle occurrence, generate a heat map of parking spaces. The results using twelve different subsets from the PKLot and CNRPark-EXT parking lot datasets show that the method achieved an AP25 score up to 95.60\% and AP50 score up to 79.90\%.
A Systematic Review on Computer Vision-Based Parking Lot Management Applied on Public Datasets
Mar 12, 2022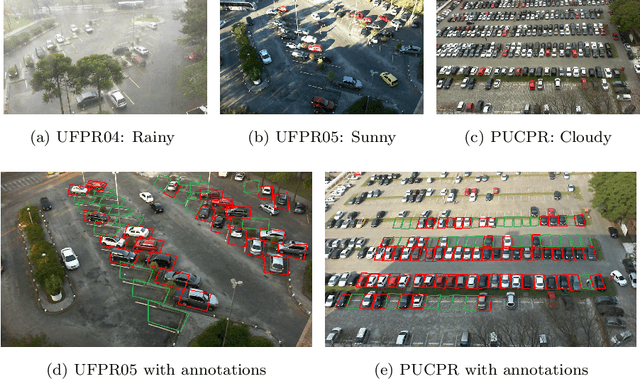
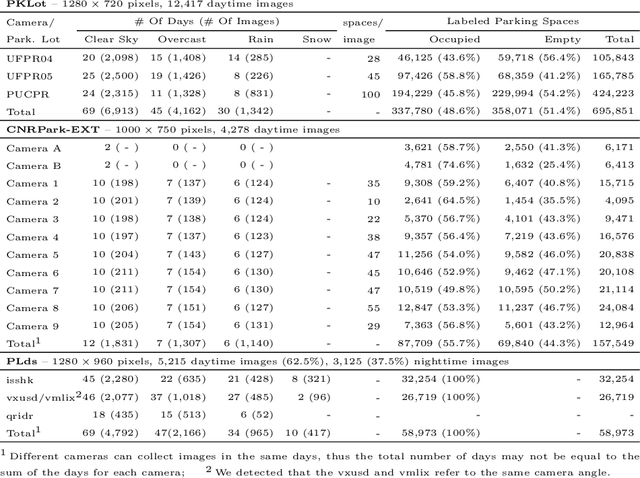

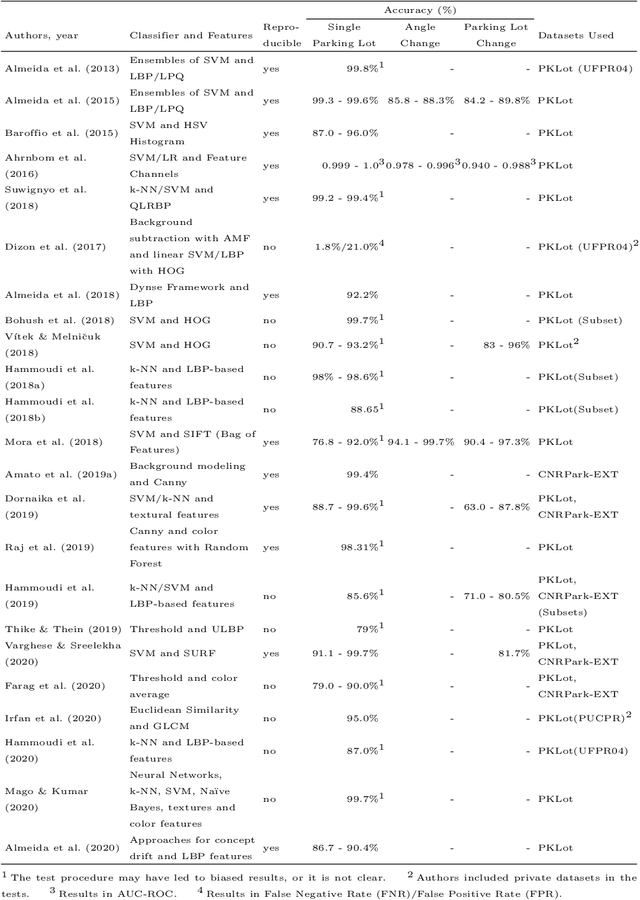
Computer vision-based parking lot management methods have been extensively researched upon owing to their flexibility and cost-effectiveness. To evaluate such methods authors often employ publicly available parking lot image datasets. In this study, we surveyed and compared robust publicly available image datasets specifically crafted to test computer vision-based methods for parking lot management approaches and consequently present a systematic and comprehensive review of existing works that employ such datasets. The literature review identified relevant gaps that require further research, such as the requirement of dataset-independent approaches and methods suitable for autonomous detection of position of parking spaces. In addition, we have noticed that several important factors such as the presence of the same cars across consecutive images, have been neglected in most studies, thereby rendering unrealistic assessment protocols. Furthermore, the analysis of the datasets also revealed that certain features that should be present when developing new benchmarks, such as the availability of video sequences and images taken in more diverse conditions, including nighttime and snow, have not been incorporated.
Extracting Lungs from CT Images using Fully Convolutional Networks
Apr 27, 2018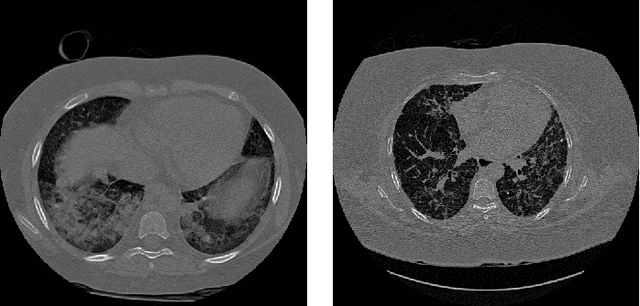
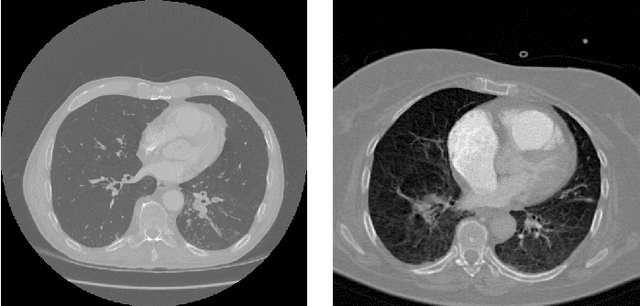
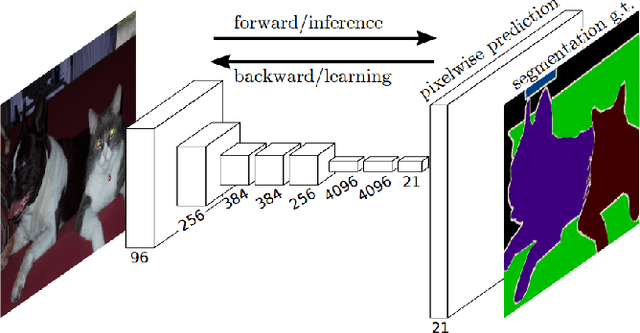
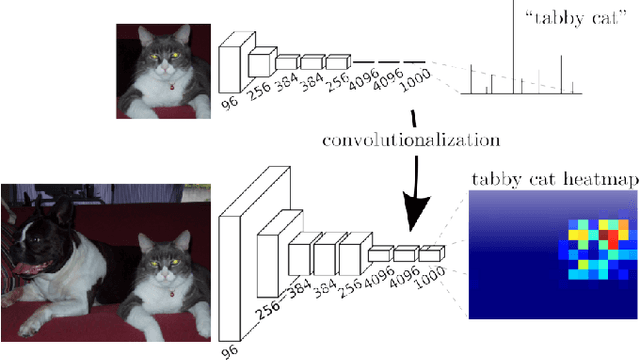
Analysis of cancer and other pathological diseases, like the interstitial lung diseases (ILDs), is usually possible through Computed Tomography (CT) scans. To aid this, a preprocessing step of segmentation is performed to reduce the area to be analyzed, segmenting the lungs and removing unimportant regions. Generally, complex methods are developed to extract the lung region, also using hand-made feature extractors to enhance segmentation. With the popularity of deep learning techniques and its automated feature learning, we propose a lung segmentation approach using fully convolutional networks (FCNs) combined with fully connected conditional random fields (CRF), employed in many state-of-the-art segmentation works. Aiming to develop a generalized approach, the publicly available datasets from University Hospitals of Geneva (HUG) and VESSEL12 challenge were studied, including many healthy and pathological CT scans for evaluation. Experiments using the dataset individually, its trained model on the other dataset and a combination of both datasets were employed. Dice scores of $98.67\%\pm0.94\%$ for the HUG-ILD dataset and $99.19\%\pm0.37\%$ for the VESSEL12 dataset were achieved, outperforming works in the former and obtaining similar state-of-the-art results in the latter dataset, showing the capability in using deep learning approaches.