 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearned Image Compression for Vision-Language-Action Models
Jun 15, 2026Vision-language-action (VLA) models increasingly rely on high-frequency multi-camera observations, making visual communication a major bottleneck for real-time robotic control in bandwidth-constrained or distributed deployment settings. Existing image and video codecs, however, are designed to preserve generic visual fidelity rather than the control performance of downstream VLA policies. In this work, we introduce SPARC (SPatially Adaptive Rate Control), a learned image compression framework tailored for VLA-driven robots. Our key observation is that the importance of visual information varies substantially across both camera views and spatial regions within an image. Based on this observation, SPARC employs a lightweight temporal mask selector that adaptively allocates bitrate over latent representations according to task relevance while leveraging temporal context. We further introduce a tilted rate loss that stabilizes training by reducing the tendency of entropy-based objectives to over-suppress rare yet task-critical visual patterns. Experiments on diverse robotic benchmarks, including RoboCasa365, VLABench, and LIBERO, show that SPARC consistently achieves stronger control performance than conventional image/video codecs and recent learned compression methods under the same bitrate budget. We additionally demonstrate real-world deployment benefits in remote-control settings, where our method substantially improves the bitrate-success tradeoff.
Decoding with Limited Teacher Supervision Requires Understanding When to Trust the Teacher
Jun 26, 2024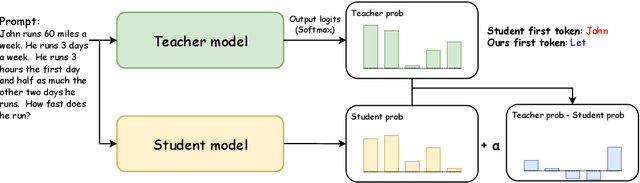
How can sLLMs efficiently utilize the supervision of LLMs to improve their generative quality? This question has been well studied in scenarios where there is no restriction on the number of LLM supervisions one can use, giving birth to many decoding algorithms that utilize supervision without further training. However, it is still unclear what is an effective strategy under the limited supervision scenario, where we assume that no more than a few tokens can be generated by LLMs. To this end, we develop an algorithm to effectively aggregate the sLLM and LLM predictions on initial tokens so that the generated tokens can more accurately condition the subsequent token generation by sLLM only. Critically, we find that it is essential to adaptively overtrust or disregard the LLM prediction based on the confidence of the sLLM. Through our experiments on a wide range of models and datasets, we demonstrate that our method provides a consistent improvement over conventional decoding strategies.