 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Interval Analysis Based Study for the Design and the Comparison of 3-DOF Parallel Kinematic Machines
Aug 08, 2007



This paper addresses an interval analysis based study that is applied to the design and the comparison of 3-DOF parallel kinematic machines. Two design criteria are used, (i) a regular workspace shape and, (ii) a kinetostatic performance index that needs to be as homogeneous as possible throughout the workspace. The interval analysis based method takes these two criteria into account: on the basis of prescribed kinetostatic performances, the workspace is analysed to find out the largest regular dextrous workspace enclosed in the Cartesian workspace. An algorithm describing this method is introduced. Two 3-DOF translational parallel mechanisms designed for machining applications are compared using this method. The first machine features three fixed linear joints which are mounted orthogonally and the second one features three linear joints which are mounted in parallel. In both cases, the mobile platform moves in the Cartesian x-y-z space with fixed orientation.
A Comparative Study between Two Three-DOF Parallel Kinematic Machines using Kinetostatic Criteria and Interval Analysis
Jul 19, 2007


This paper addresses the workspace analysis of two 3-DOF translational parallel mechanisms designed for machining applications. The two machines features three fixed linear joints. The joint axes of the first machine are orthogonal whereas these of the second are parallel. In both cases, the mobile platform moves in the Cartesian $x-y-z$ space with fixed orientation. The workspace analysis is conducted on the basis of prescribed kinetostatic performances. Interval analysis based methods are used to compute the dextrous workspace and the largest cube enclosed in this workspace.
Workspace Analysis of the Orthoglide using Interval Analysis
May 09, 2007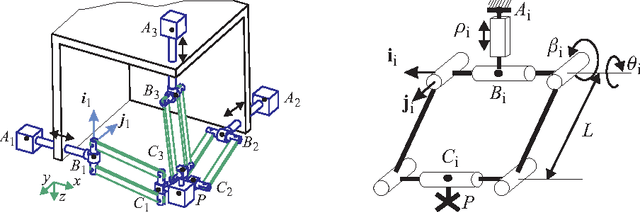
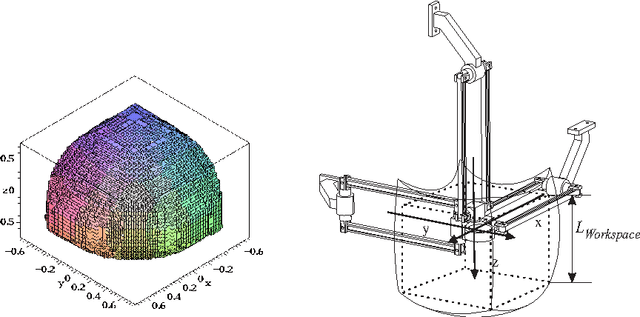
This paper addresses the workspace analysis of the orthoglide, a 3-DOF parallel mechanism designed for machining applications. This machine features three fixed parallel linear joints which are mounted orthogonally and a mobile platform which moves in the Cartesian x-y-z space with fixed orientation. The workspace analysis is conducted on the bases of prescribed kinetostatic performances. The interesting features of the orthoglide are a regular Cartesian workspace shape, uniform performances in all directions and good compactness. Interval analysis based methods for computing the dextrous workspace and the largest cube enclosed in this workspace are presented.