Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorkspace Analysis of the Orthoglide using Interval Analysis
Paper and Code
May 09, 2007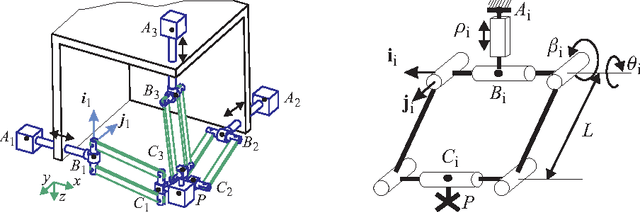
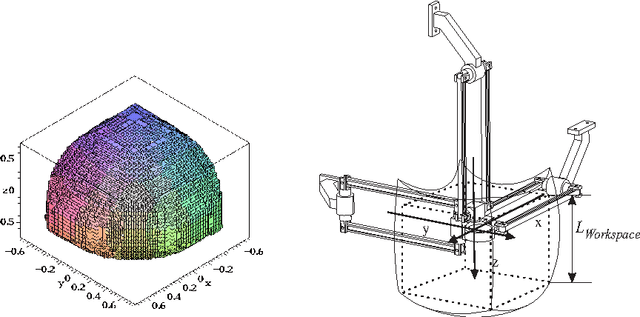
This paper addresses the workspace analysis of the orthoglide, a 3-DOF parallel mechanism designed for machining applications. This machine features three fixed parallel linear joints which are mounted orthogonally and a mobile platform which moves in the Cartesian x-y-z space with fixed orientation. The workspace analysis is conducted on the bases of prescribed kinetostatic performances. The interesting features of the orthoglide are a regular Cartesian workspace shape, uniform performances in all directions and good compactness. Interval analysis based methods for computing the dextrous workspace and the largest cube enclosed in this workspace are presented.
* 8th International Symposium on Advances in Robot Kinematics,
Kluwer Academic Publishers (2002) 1-10
View paper on