 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParametric Stiffness Analysis of the Orthoglide
Aug 28, 2007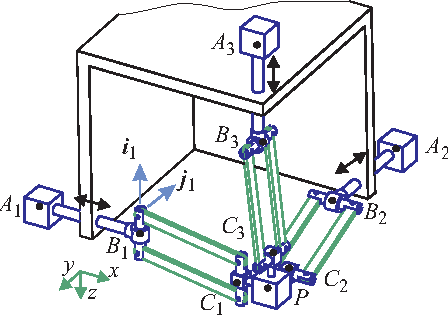
This paper presents a parametric stiffness analysis of the Orthoglide, a 3-DOF translational Parallel Kinematic Machine. First, a compliant modeling of the Orthoglide is conducted based on an existing method. Then stiffness matrix is symbolically computed. This allows one to easily study the influence of the geometric design parameters on the matrix elements. Critical links are displayed. Cutting forces are then modeled so that static displacements of the Orthoglide tool during slot milling are symbolically computed. Influence of the geometric design parameters on the static displacements is checked as well. Other machining operations can be modeled. This parametric stiffness analysis can be applied to any parallel manipulator for which stiffness is a critical issue.
An Interval Analysis Based Study for the Design and the Comparison of 3-DOF Parallel Kinematic Machines
Aug 08, 2007



This paper addresses an interval analysis based study that is applied to the design and the comparison of 3-DOF parallel kinematic machines. Two design criteria are used, (i) a regular workspace shape and, (ii) a kinetostatic performance index that needs to be as homogeneous as possible throughout the workspace. The interval analysis based method takes these two criteria into account: on the basis of prescribed kinetostatic performances, the workspace is analysed to find out the largest regular dextrous workspace enclosed in the Cartesian workspace. An algorithm describing this method is introduced. Two 3-DOF translational parallel mechanisms designed for machining applications are compared using this method. The first machine features three fixed linear joints which are mounted orthogonally and the second one features three linear joints which are mounted in parallel. In both cases, the mobile platform moves in the Cartesian x-y-z space with fixed orientation.
L'orthoglide : une machine-outil rapide d'architecture parallèle isotrope
Jul 24, 2007



This article presents the Orthoglide project. The purpose of this project is the realization of a prototype of machine tool to three degrees of translation. The characteristic of this machine is a parallel kinematic architecture optimized to obtain a compact workspace with homogeneous performance. For that, the principal criterion of design which was used is the isotropy.
The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms for Machining Applications
May 09, 2007



The subject of this paper is the optimal design of a parallel mechanism intended for three-axis machining applications. Parallel mechanisms are interesting alternative designs in this context but most of them are designed for three- or six-axis machining applications. In the last case, the position and the orientation of the tool are coupled and the shape of the workspace is complex. The aim of this paper is to use a simple parallel mechanism with two-degree-of-freedom (dof) for translational motions and to add one leg to have one-dof rotational motion. The kinematics and singular configurations are studied as well as an optimization method. The three-degree-of-freedom mechanisms analyzed in this paper can be extended to four-axis machines by adding a fourth axis in series with the first two.
A Novel method for the design of 2-DOF Parallel mechanisms for machining applications
May 09, 2007



Parallel Kinematic Mechanisms (PKM) are interesting alternative designs for machine tools. A design method based on velocity amplification factors analysis is presented in this paper. The comparative study of two simple two-degree-of-freedom PKM dedicated to machining applications is led through this method: the common desired properties are the largest square Cartesian workspace for given kinetostatic performances. The orientation and position of the Cartesian workspace are chosen to avoid singularities and to produce the best ratio between Cartesian workspace size and mechanism size. The machine size of each resulting design is used as a comparative criterion.
Design of a 3 Axis Parallel Machine Tool for High Speed Machining: The Orthoglide
May 09, 2007



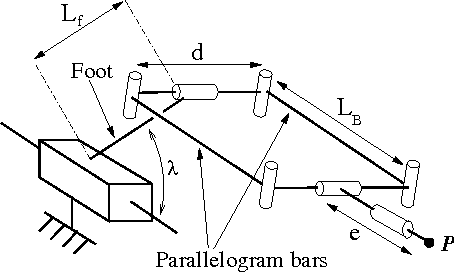
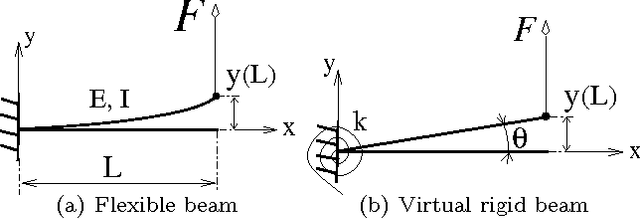
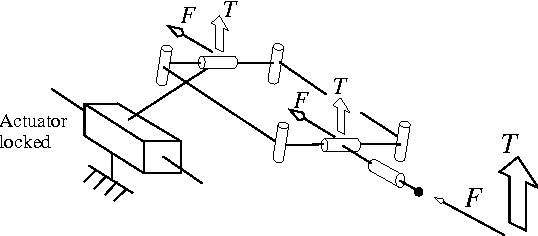
The Orthoglide project aims at designing a new 3-axis machine tool for High Speed Machining. Basis kinematics is a 3 degree-of-freedom translational parallel mechanism. This basis was submitted to isotropic and manipulability constraints that allowed the optmization of its kinematic architecture and legs architecture. Thus, several leg morphologies are convenient for the chosen mechanism. We explain the process that led us to the choice we made for the Orthoglide. A static study is presented to show how singular configurations of the legs can cause stiffness problems.
The Design of Parallel Kinematic Machine Tools Using Kinetostatic Performance Criteria
May 08, 2007



Most industrial machine tools have a serial kinematic architecture, which means that each axis has to carry the following one, including its actuators and joints. High Speed Machining highlights some drawbacks of such architectures: heavy moving parts require from the machine structure high stiffness to limit bending problems that lower the machine accuracy, and limit the dynamic performances of the feed axes. That is why PKMs attract more and more researchers and companies, because they are claimed to offer several advantages over their serial counterparts, like high structural rigidity and high dynamic capacities. Indeed, the parallel kinematic arrangement of the links provides higher stiffness and lower moving masses that reduce inertia effects. Thus, PKMs have better dynamic performances. However, the design of a parallel kinematic machine tool (PKMT) is a hard task that requires further research studies before wide industrial use can be expected. Many criteria need to be taken into account in the design of a PKMT. We pay special attention to the description of kinetostatic criteria that rely on the conditioning of the Jacobian matrix of the mechanism. The organisation of this paper is as follows: next section introduces general remarks about PKMs, then is explained why PKMs can be interesting alternative machine tool designs. Then are presented existing PKMTs. An application to the design of a small-scale machine tool prototype developed at IRCCyN is presented at the end of this paper.