 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStride: a flexible platform for high-performance ultrasound computed tomography
Oct 07, 2021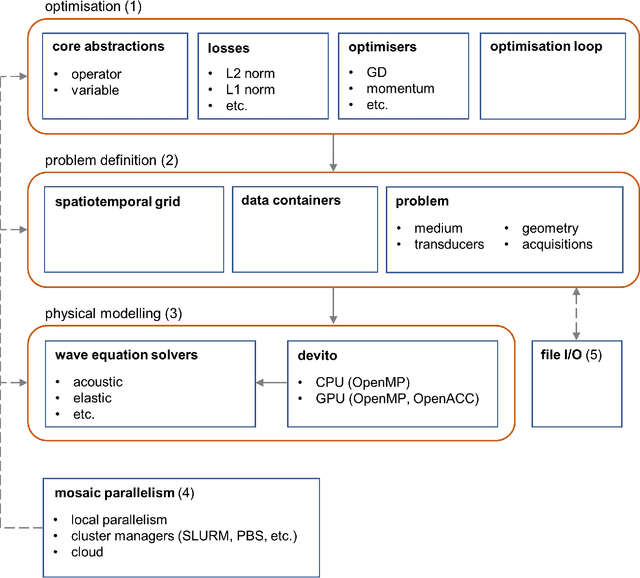
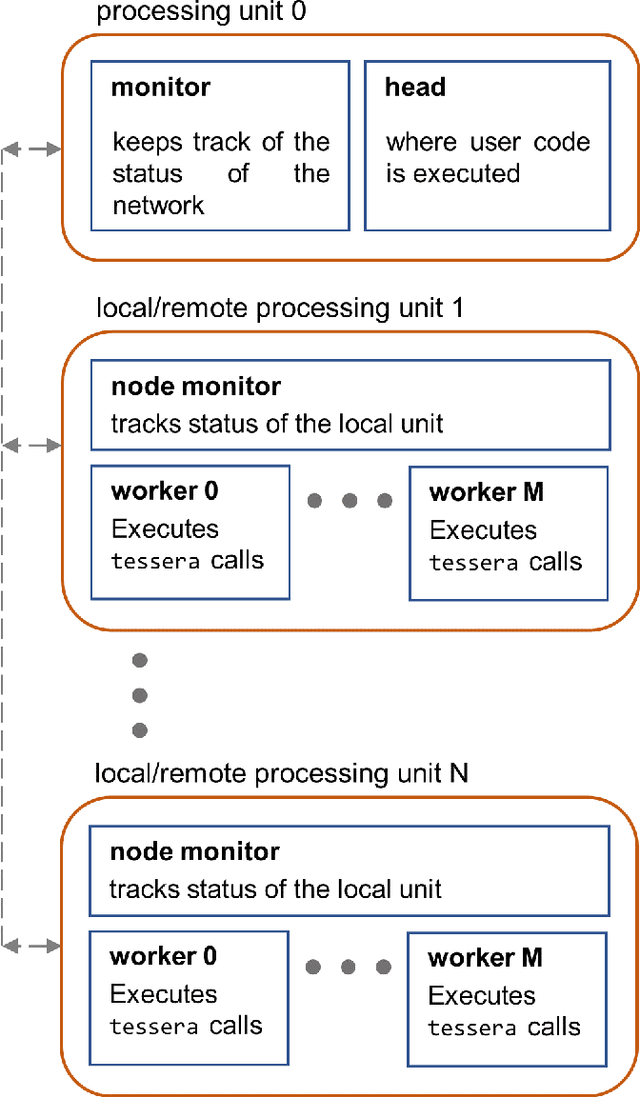
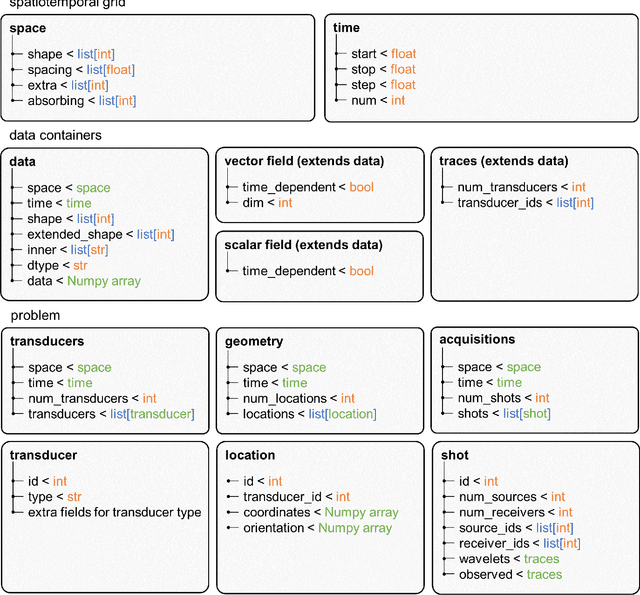
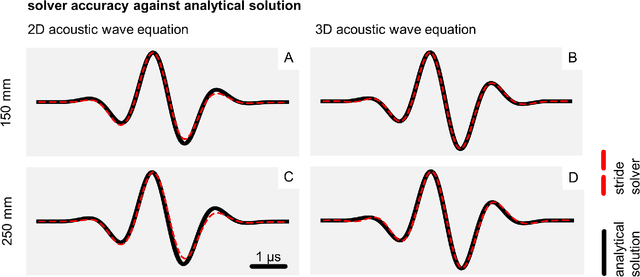
Advanced ultrasound computed tomography techniques like full-waveform inversion are mathematically challenging and orders of magnitude more computationally expensive than conventional ultrasound imaging methods. This computational and algorithmic complexity, and a lack of open-source libraries in this field, represent a barrier preventing the generalised adoption of these techniques, slowing the pace of research and hindering reproducibility. Consequently, we have developed Stride, an open-source Python library for the solution of large-scale ultrasound tomography problems. On one hand, Stride provides high-level interfaces and tools for expressing the types of optimisation problems encountered in medical ultrasound tomography. On the other, these high-level abstractions seamlessly integrate with high-performance wave-equation solvers and with scalable parallelisation routines. The wave-equation solvers are generated automatically using Devito, a domain specific language, and the parallelisation routines are provided through the custom actor-based library Mosaic. Through a series of examples, we show how Stride can handle realistic tomographic problems, in 2D and 3D, providing intuitive and flexible interfaces that scale from a local multi-processing environment to a multi-node high-performance cluster.
Spatial response identification enables robust experimental ultrasound computed tomography
Apr 05, 2021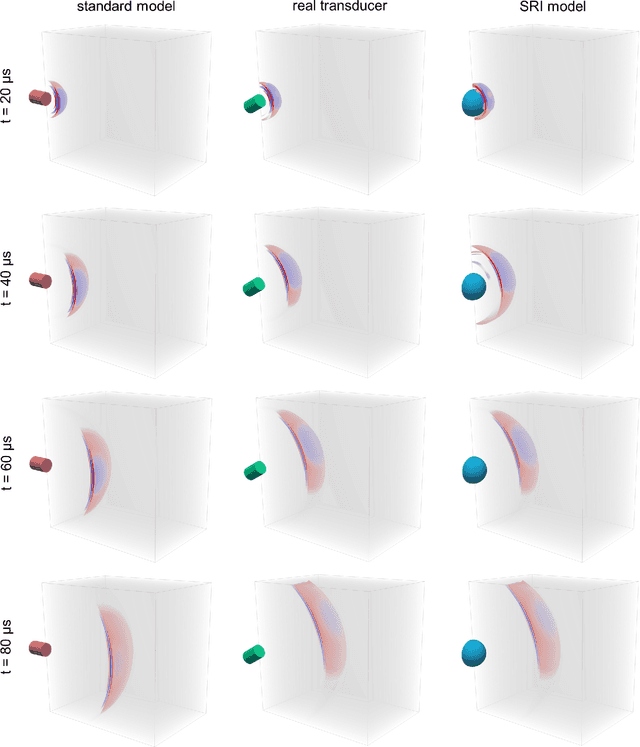
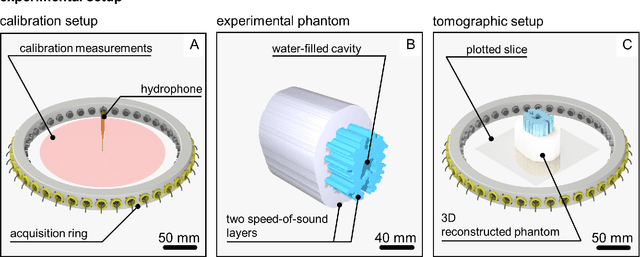
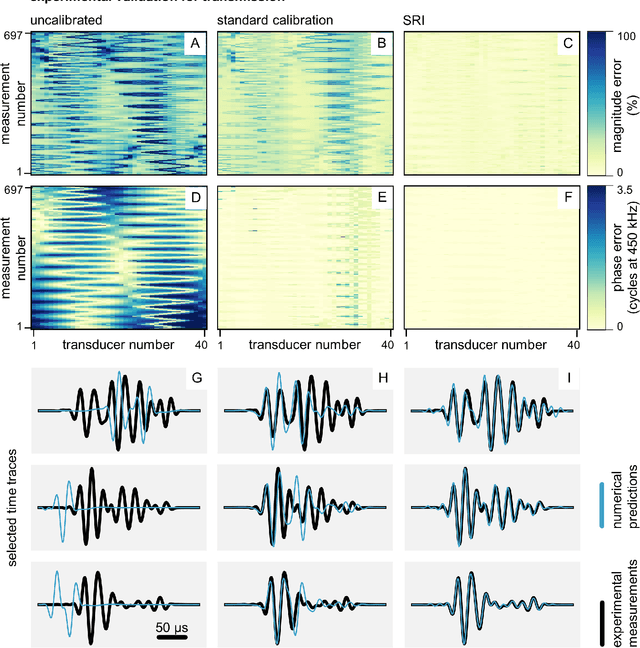
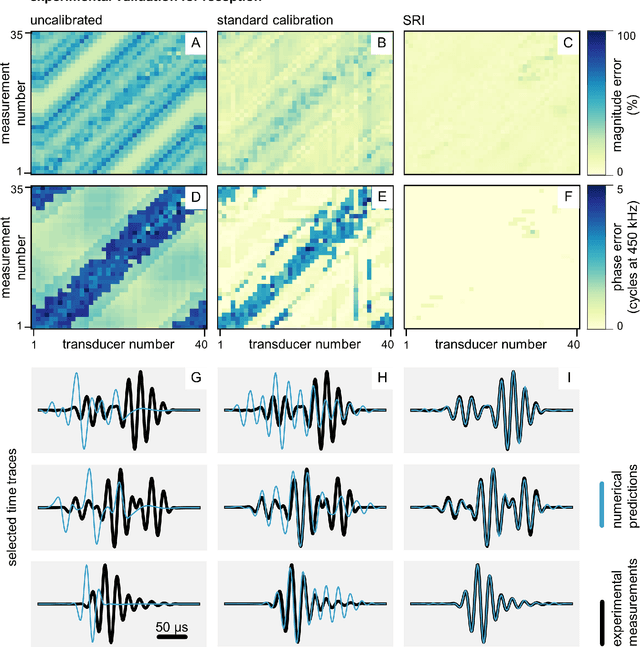
Ultrasound computed tomography techniques have the potential to provide clinicians with 3D, quantitative and high-resolution information of both soft and hard tissues such as the breast or the adult human brain. Their practical application requires accurate modelling of the acquisition setup: the spatial location, orientation, and impulse response of each ultrasound transducer. However, existing calibration methods fail to accurately characterise these transducers unless their size can be considered negligible when compared to the dominant wavelength, which reduces signal-to-noise ratios below usable levels in the presence of high-contrast tissues such as the skull. In this paper, we introduce a methodology that can simultaneously estimate the location, orientation, and impulse response of the ultrasound transducers in a single calibration. We do this by extending spatial response identification, an algorithm that we have recently proposed to estimate transducer impulse responses. Our proposed methodology replaces the transducers in the acquisition device with a surrogate model whose effective response matches the experimental data by fitting a numerical model of wave propagation. This results in a flexible and robust calibration procedure that can accurately predict the behaviour of the ultrasound acquisition device without ever having to know where the real transducers are or their individual impulse response. Experimental results using a ring acquisition system show that spatial response identification produces calibrations of significantly higher quality than standard methodologies across all transducers, both in transmission and in reception. Experimental full-waveform inversion reconstructions of a tissue-mimicking phantom demonstrate that spatial response identification generates more accurate reconstructions than those produced with standard calibration techniques.