 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupermarket-6DoF: A Real-World Grasping Dataset and Grasp Pose Representation Analysis
Feb 22, 2025



We present Supermarket-6DoF, a real-world dataset of 1500 grasp attempts across 20 supermarket objects with publicly available 3D models. Unlike most existing grasping datasets that rely on analytical metrics or simulation for grasp labeling, our dataset provides ground-truth outcomes from physical robot executions. Among the few real-world grasping datasets, wile more modest in size, Supermarket-6DoF uniquely features full 6-DoF grasp poses annotated with both initial grasp success and post-grasp stability under external perturbation. We demonstrate the dataset's utility by analyzing three grasp pose representations for grasp success prediction from point clouds. Our results show that representing the gripper geometry explicitly as a point cloud achieves higher prediction accuracy compared to conventional quaternion-based grasp pose encoding.
In-Hand Gravitational Pivoting Using Tactile Sensing
Oct 11, 2022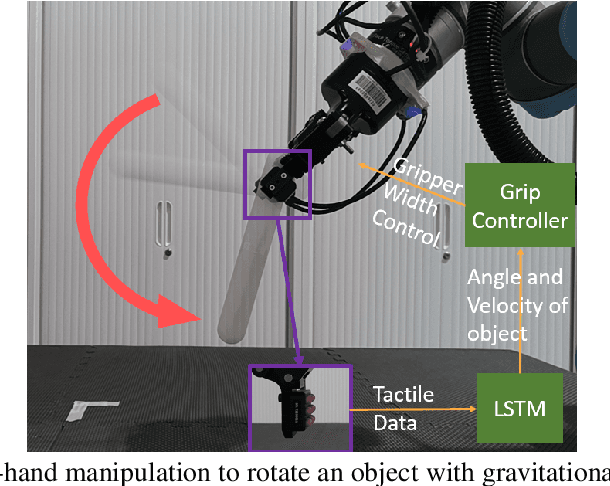
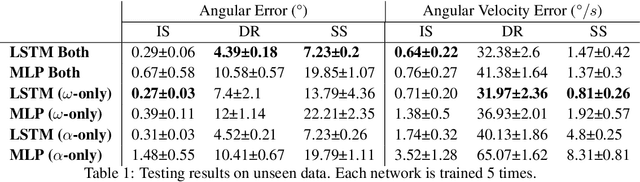


We study gravitational pivoting, a constrained version of in-hand manipulation, where we aim to control the rotation of an object around the grip point of a parallel gripper. To achieve this, instead of controlling the gripper to avoid slip, we embrace slip to allow the object to rotate in-hand. We collect two real-world datasets, a static tracking dataset and a controller-in-the loop dataset, both annotated with object angle and angular velocity labels. Both datasets contain force-based tactile information on ten different household objects. We train an LSTM model to predict the angular position and velocity of the held object from purely tactile data. We integrate this model with a controller that opens and closes the gripper allowing the object to rotate to desired relative angles. We conduct real-world experiments where the robot is tasked to achieve a relative target angle. We show that our approach outperforms a sliding-window based MLP in a zero-shot generalization setting with unseen objects. Furthermore, we show a 16.6% improvement in performance when the LSTM model is fine-tuned on a small set of data collected with both the LSTM model and the controller in-the-loop. Code and videos are available at https://rhys-newbury.github.io/projects/pivoting/