 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTomatoDIFF: On-plant Tomato Segmentation with Denoising Diffusion Models
Jul 03, 2023Artificial intelligence applications enable farmers to optimize crop growth and production while reducing costs and environmental impact. Computer vision-based algorithms in particular, are commonly used for fruit segmentation, enabling in-depth analysis of the harvest quality and accurate yield estimation. In this paper, we propose TomatoDIFF, a novel diffusion-based model for semantic segmentation of on-plant tomatoes. When evaluated against other competitive methods, our model demonstrates state-of-the-art (SOTA) performance, even in challenging environments with highly occluded fruits. Additionally, we introduce Tomatopia, a new, large and challenging dataset of greenhouse tomatoes. The dataset comprises high-resolution RGB-D images and pixel-level annotations of the fruits.
Fast image-based obstacle detection from unmanned surface vehicles
Mar 06, 2015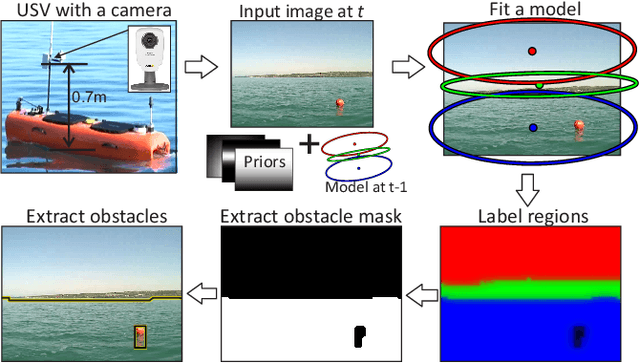

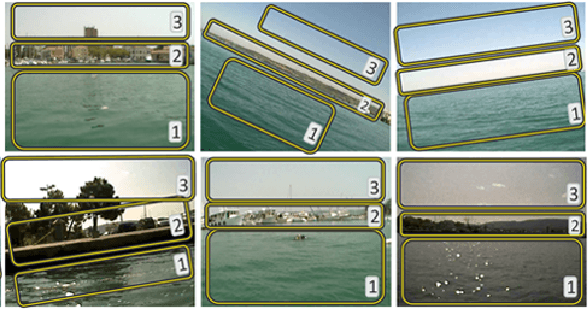
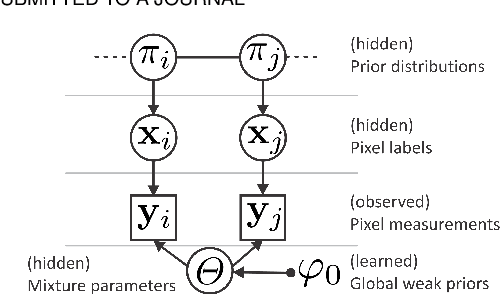
Obstacle detection plays an important role in unmanned surface vehicles (USV). The USVs operate in highly diverse environments in which an obstacle may be a floating piece of wood, a scuba diver, a pier, or a part of a shoreline, which presents a significant challenge to continuous detection from images taken onboard. This paper addresses the problem of online detection by constrained unsupervised segmentation. To this end, a new graphical model is proposed that affords a fast and continuous obstacle image-map estimation from a single video stream captured onboard a USV. The model accounts for the semantic structure of marine environment as observed from USV by imposing weak structural constraints. A Markov random field framework is adopted and a highly efficient algorithm for simultaneous optimization of model parameters and segmentation mask estimation is derived. Our approach does not require computationally intensive extraction of texture features and comfortably runs in real-time. The algorithm is tested on a new, challenging, dataset for segmentation and obstacle detection in marine environments, which is the largest annotated dataset of its kind. Results on this dataset show that our model outperforms the related approaches, while requiring a fraction of computational effort.