 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOLD: Reinforcement Learning with Slot Object-Centric Latent Dynamics
Oct 11, 2024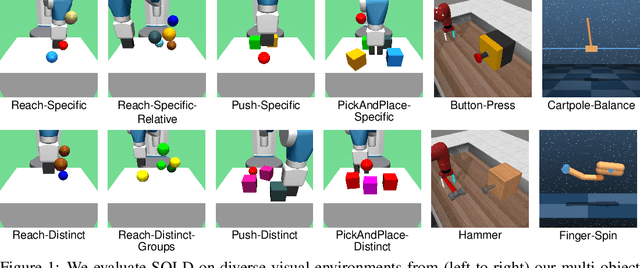
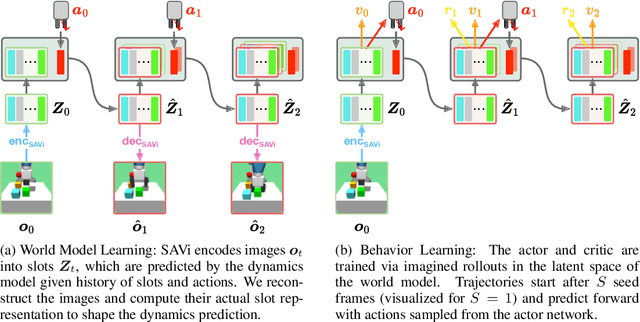

Learning a latent dynamics model provides a task-agnostic representation of an agent's understanding of its environment. Leveraging this knowledge for model-based reinforcement learning holds the potential to improve sample efficiency over model-free methods by learning inside imagined rollouts. Furthermore, because the latent space serves as input to behavior models, the informative representations learned by the world model facilitate efficient learning of desired skills. Most existing methods rely on holistic representations of the environment's state. In contrast, humans reason about objects and their interactions, forecasting how actions will affect specific parts of their surroundings. Inspired by this, we propose Slot-Attention for Object-centric Latent Dynamics (SOLD), a novel algorithm that learns object-centric dynamics models in an unsupervised manner from pixel inputs. We demonstrate that the structured latent space not only improves model interpretability but also provides a valuable input space for behavior models to reason over. Our results show that SOLD outperforms DreamerV3, a state-of-the-art model-based RL algorithm, across a range of benchmark robotic environments that evaluate for both relational reasoning and low-level manipulation capabilities. Videos are available at https://slot-latent-dynamics.github.io/.