 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRealtime Spectrum Monitoring via Reinforcement Learning -- A Comparison Between Q-Learning and Heuristic Methods
Jul 11, 2023Due to technological advances in the field of radio technology and its availability, the number of interference signals in the radio spectrum is continuously increasing. Interference signals must be detected in a timely fashion, in order to maintain standards and keep emergency frequencies open. To this end, specialized (multi-channel) receivers are used for spectrum monitoring. In this paper, the performances of two different approaches for controlling the available receiver resources are compared. The methods used for resource management (ReMa) are linear frequency tuning as a heuristic approach and a Q-learning algorithm from the field of reinforcement learning. To test the methods to be investigated, a simplified scenario was designed with two receiver channels monitoring ten non-overlapping frequency bands with non-uniform signal activity. For this setting, it is shown that the Q-learning algorithm used has a significantly higher detection rate than the heuristic approach at the expense of a smaller exploration rate. In particular, the Q-learning approach can be parameterized to allow for a suitable trade-off between detection and exploration rate.
Joint Communication, Sensing and Localization for Airborne Applications
Sep 22, 2022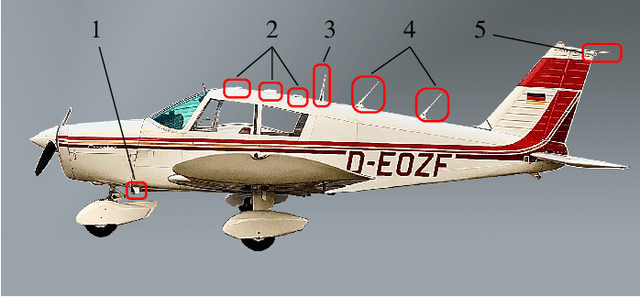
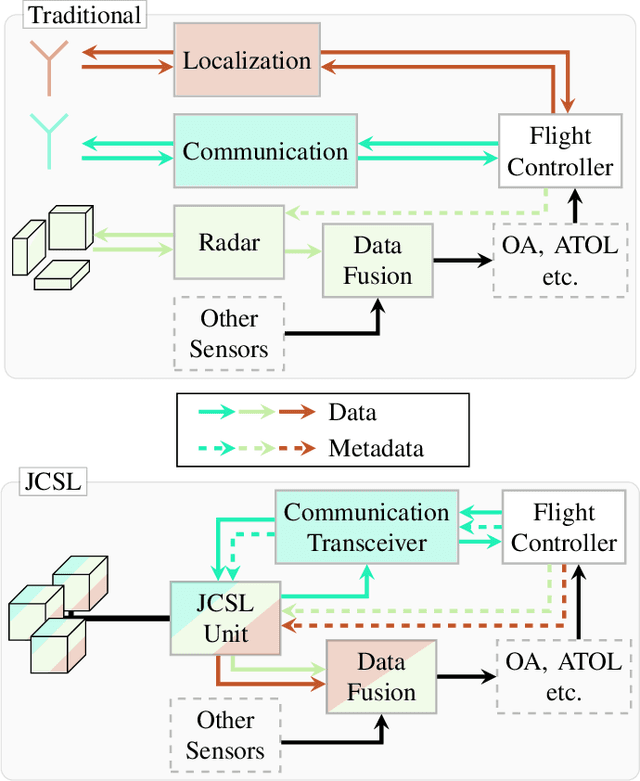
With the upcoming trends in autonomous driving and urban air mobility, the number of self-navigating vehicles will increase, since they are foreseen for deliveries as well as autonomous taxis among other applications. To this end, a multitude of on-board systems for wireless communication, environment sensing, and localization will become mandatory. This is particularly true for unmanned aerial vehicles (UAVs), since participation in the airspace requires compatibility to and safe interaction with established users. A certain number of systems are already in-use and occupy defined spectra as well as installation space, which limits the freedom in the design of new systems. The miniaturization of aerial vehicles like drones for delivery services further reduces the degrees of freedom, especially in terms of size and weight of any additional equipment. Hence, in this paper a joint approach of the design of joint communication, sensing and localization for UAVs is discussed. Towards this goal, multi-mode multi-port antennas and joint waveform design are proposed as a part of the solution, when elevating autonomous driving to the third dimension.