 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExamination Minutes Measurement of Single-Antenna-Element Beamforming
Mar 07, 2024This document shall provide all knowledge gained in conjunction and preparation with the conducted measurements in the antenna measurement chamber of the Institute of Microwave and Wireless Systems (IMW) of the Leibniz University of Hannover (LUH). The measurements have been prepared and conducted by Lukas Grundmann, IMW, and Nils L. Johannsen, Chair of Information and Coding Theory (ICT) of the Christian- Albrechts-University (CAU) of Kiel. This minute shall allow a simpler understanding and quicker reapplication of the required calibrations and system setup for the measurements of further antennas.
Joint Communication, Sensing and Localization for Airborne Applications
Sep 22, 2022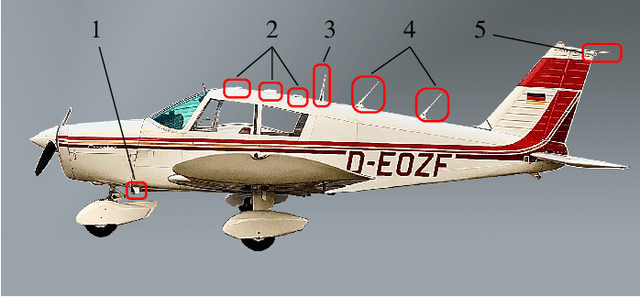
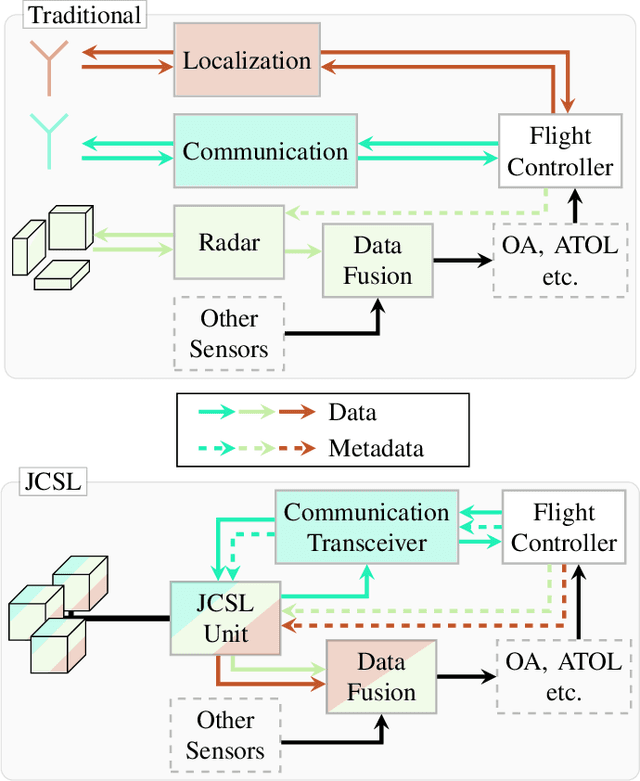
With the upcoming trends in autonomous driving and urban air mobility, the number of self-navigating vehicles will increase, since they are foreseen for deliveries as well as autonomous taxis among other applications. To this end, a multitude of on-board systems for wireless communication, environment sensing, and localization will become mandatory. This is particularly true for unmanned aerial vehicles (UAVs), since participation in the airspace requires compatibility to and safe interaction with established users. A certain number of systems are already in-use and occupy defined spectra as well as installation space, which limits the freedom in the design of new systems. The miniaturization of aerial vehicles like drones for delivery services further reduces the degrees of freedom, especially in terms of size and weight of any additional equipment. Hence, in this paper a joint approach of the design of joint communication, sensing and localization for UAVs is discussed. Towards this goal, multi-mode multi-port antennas and joint waveform design are proposed as a part of the solution, when elevating autonomous driving to the third dimension.