 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXRefine: Attention-Guided Keypoint Match Refinement
Jan 18, 2026Sparse keypoint matching is crucial for 3D vision tasks, yet current keypoint detectors often produce spatially inaccurate matches. Existing refinement methods mitigate this issue through alignment of matched keypoint locations, but they are typically detector-specific, requiring retraining for each keypoint detector. We introduce XRefine, a novel, detector-agnostic approach for sub-pixel keypoint refinement that operates solely on image patches centered at matched keypoints. Our cross-attention-based architecture learns to predict refined keypoint coordinates without relying on internal detector representations, enabling generalization across detectors. Furthermore, XRefine can be extended to handle multi-view feature tracks. Experiments on MegaDepth, KITTI, and ScanNet demonstrate that the approach consistently improves geometric estimation accuracy, achieving superior performance compared to existing refinement methods while maintaining runtime efficiency. Our code and trained models can be found at https://github.com/boschresearch/xrefine.
Deep Metric Learning for Ground Images
Sep 03, 2021


Ground texture based localization methods are potential prospects for low-cost, high-accuracy self-localization solutions for robots. These methods estimate the pose of a given query image, i.e. the current observation of the ground from a downward-facing camera, in respect to a set of reference images whose poses are known in the application area. In this work, we deal with the initial localization task, in which we have no prior knowledge about the current robot positioning. In this situation, the localization method would have to consider all available reference images. However, in order to reduce computational effort and the risk of receiving a wrong result, we would like to consider only those reference images that are actually overlapping with the query image. For this purpose, we propose a deep metric learning approach that retrieves the most similar reference images to the query image. In contrast to existing approaches to image retrieval for ground images, our approach achieves significantly better recall performance and improves the localization performance of a state-of-the-art ground texture based localization method.
Model-Based Parameter Optimization for Ground Texture Based Localization Methods
Sep 03, 2021

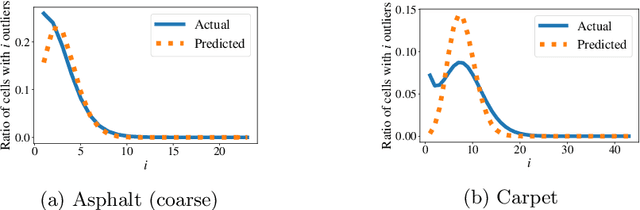
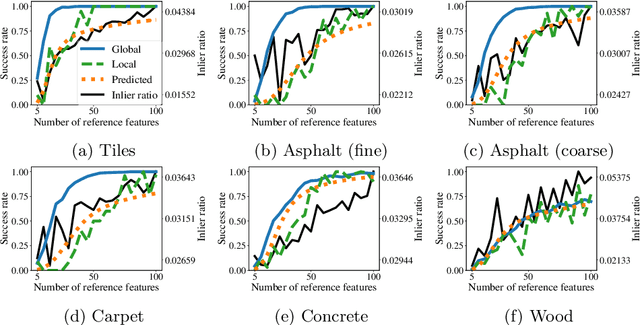
A promising approach to accurate positioning of robots is ground texture based localization. It is based on the observation that visual features of ground images enable fingerprint-like place recognition. We tackle the issue of efficient parametrization of such methods, deriving a prediction model for localization performance, which requires only a small collection of sample images of an application area. In a first step, we examine whether the model can predict the effects of changing one of the most important parameters of feature-based localization methods: the number of extracted features. We examine two localization methods, and in both cases our evaluation shows that the predictions are sufficiently accurate. Since this model can be used to find suitable values for any parameter, we then present a holistic parameter optimization framework, which finds suitable texture-specific parameter configurations, using only the model to evaluate the considered parameter configurations.
Features for Ground Texture Based Localization -- A Survey
Mar 03, 2020

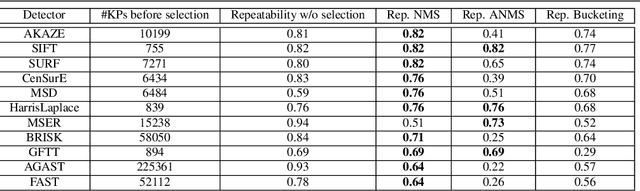
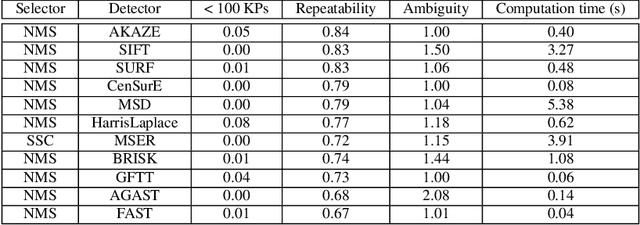
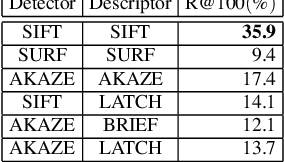
Ground texture based vehicle localization using feature-based methods is a promising approach to achieve infrastructure-free high-accuracy localization. In this paper, we provide the first extensive evaluation of available feature extraction methods for this task, using separately taken image pairs as well as synthetic transformations. We identify AKAZE, SURF and CenSurE as best performing keypoint detectors, and find pairings of CenSurE with the ORB, BRIEF and LATCH feature descriptors to achieve greatest success rates for incremental localization, while SIFT stands out when considering severe synthetic transformations as they might occur during absolute localization.
Ground Texture Based Localization Using Compact Binary Descriptors
Feb 25, 2020

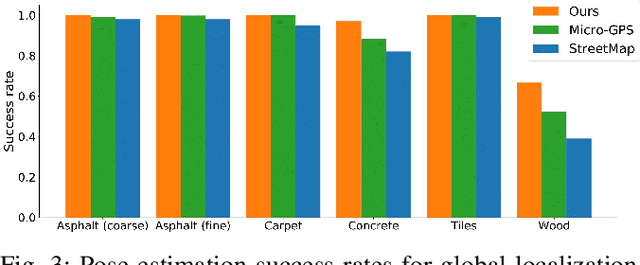

Ground texture based localization is a promising approach to achieve high-accuracy positioning of vehicles. We present a self-contained method that can be used for global localization as well as for subsequent local localization updates, i.e. it allows a robot to localize without any knowledge of its current whereabouts, but it can also take advantage of a prior pose estimate to reduce computation time significantly. Our method is based on a novel matching strategy, which we call identity matching, that is based on compact binary feature descriptors. Identity matching treats pairs of features as matches only if their descriptors are identical. While other methods for global localization are faster to compute, our method reaches higher localization success rates, and can switch to local localization after the initial localization.