 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Feature Processing for Robust Human Activity Recognition on a Novel Multi-Modal Dataset
Jan 09, 2019

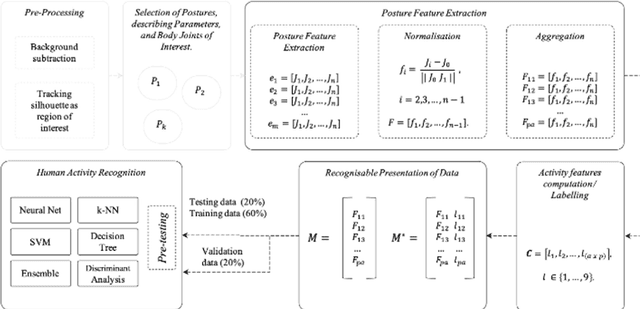

Human Activity Recognition (HAR) is a key building block of many emerging applications such as intelligent mobility, sports analytics, ambient-assisted living and human-robot interaction. With robust HAR, systems will become more human-aware, leading towards much safer and empathetic autonomous systems. While human pose detection has made significant progress with the dawn of deep convolutional neural networks (CNNs), the state-of-the-art research has almost exclusively focused on a single sensing modality, especially video. However, in safety critical applications it is imperative to utilize multiple sensor modalities for robust operation. To exploit the benefits of state-of-the-art machine learning techniques for HAR, it is extremely important to have multimodal datasets. In this paper, we present a novel, multi-modal sensor dataset that encompasses nine indoor activities, performed by 16 participants, and captured by four types of sensors that are commonly used in indoor applications and autonomous vehicles. This multimodal dataset is the first of its kind to be made openly available and can be exploited for many applications that require HAR, including sports analytics, healthcare assistance and indoor intelligent mobility. We propose a novel data preprocessing algorithm to enable adaptive feature extraction from the dataset to be utilized by different machine learning algorithms. Through rigorous experimental evaluations, this paper reviews the performance of machine learning approaches to posture recognition, and analyses the robustness of the algorithms. When performing HAR with the RGB-Depth data from our new dataset, machine learning algorithms such as a deep neural network reached a mean accuracy of up to 96.8% for classification across all stationary and dynamic activities
Robust Fusion of LiDAR and Wide-Angle Camera Data for Autonomous Mobile Robots
Aug 23, 2018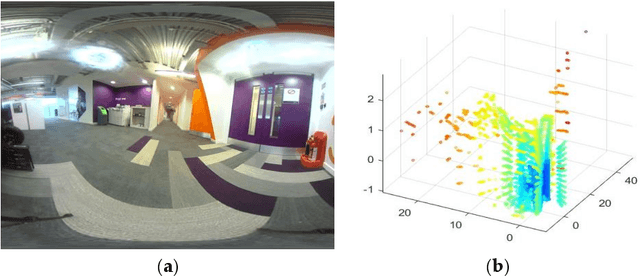

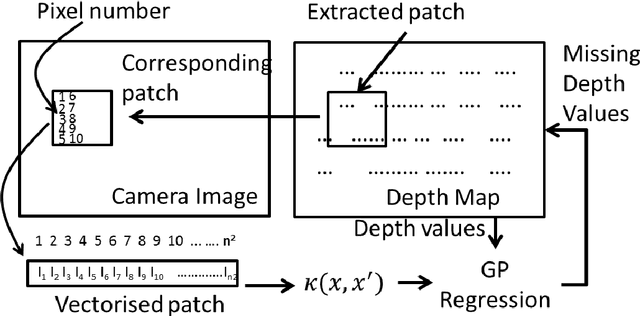
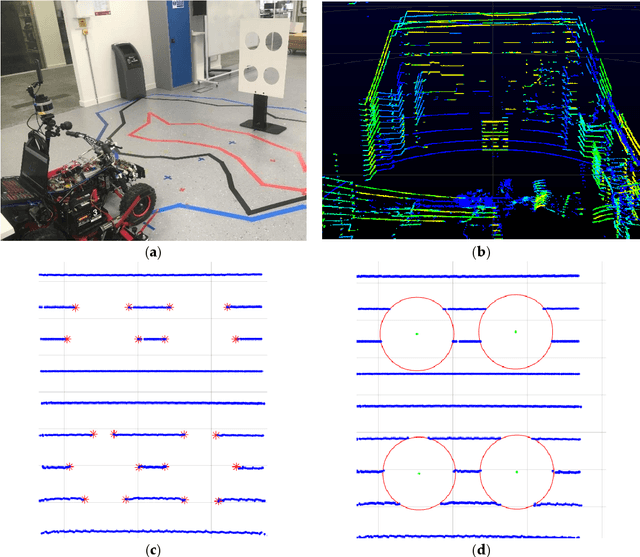
Autonomous robots that assist humans in day to day living tasks are becoming increasingly popular. Autonomous mobile robots operate by sensing and perceiving their surrounding environment to make accurate driving decisions. A combination of several different sensors such as LiDAR, radar, ultrasound sensors and cameras are utilized to sense the surrounding environment of autonomous vehicles. These heterogeneous sensors simultaneously capture various physical attributes of the environment. Such multimodality and redundancy of sensing need to be positively utilized for reliable and consistent perception of the environment through sensor data fusion. However, these multimodal sensor data streams are different from each other in many ways, such as temporal and spatial resolution, data format, and geometric alignment. For the subsequent perception algorithms to utilize the diversity offered by multimodal sensing, the data streams need to be spatially, geometrically and temporally aligned with each other. In this paper, we address the problem of fusing the outputs of a Light Detection and Ranging (LiDAR) scanner and a wide-angle monocular image sensor for free space detection. The outputs of LiDAR scanner and the image sensor are of different spatial resolutions and need to be aligned with each other. A geometrical model is used to spatially align the two sensor outputs, followed by a Gaussian Process (GP) regression-based resolution matching algorithm to interpolate the missing data with quantifiable uncertainty. The results indicate that the proposed sensor data fusion framework significantly aids the subsequent perception steps, as illustrated by the performance improvement of a uncertainty aware free space detection algorithm