 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Gradient Descent is a Hypergraph Functor
Mar 28, 2024
Cartesian reverse derivative categories (CRDCs) provide an axiomatic generalization of the reverse derivative, which allows generalized analogues of classic optimization algorithms such as gradient descent to be applied to a broad class of problems. In this paper, we show that generalized gradient descent with respect to a given CRDC induces a hypergraph functor from a hypergraph category of optimization problems to a hypergraph category of dynamical systems. The domain of this functor consists of objective functions that are 1) general in the sense that they are defined with respect to an arbitrary CRDC, and 2) open in that they are decorated spans that can be composed with other such objective functions via variable sharing. The codomain is specified analogously as a category of general and open dynamical systems for the underlying CRDC. We describe how the hypergraph functor induces a distributed optimization algorithm for arbitrary composite problems specified in the domain. To illustrate the kinds of problems our framework can model, we show that parameter sharing models in multitask learning, a prevalent machine learning paradigm, yield a composite optimization problem for a given choice of CRDC. We then apply the gradient descent functor to this composite problem and describe the resulting distributed gradient descent algorithm for training parameter sharing models.
A Categorical Representation Language and Computational System for Knowledge-Based Planning
May 26, 2023Classical planning representation languages based on first-order logic have been extensively used to model and solve planning problems, but they struggle to capture implicit preconditions and effects that arise in complex planning scenarios. To address this problem, we propose an alternative approach to representing and transforming world states during planning. Based on the category-theoretic concepts of $\mathsf{C}$-sets and double-pushout rewriting (DPO), our proposed representation can effectively handle structured knowledge about world states that support domain abstractions at all levels. It formalizes the semantics of predicates according to a user-provided ontology and preserves the semantics when transitioning between world states. This method provides a formal semantics for using knowledge graphs and relational databases to model world states and updates in planning. In this paper, we compare our category-theoretic representation with the classical planning representation. We show that our proposed representation has advantages over the classical representation in terms of handling implicit preconditions and effects, and provides a more structured framework in which to model and solve planning problems.
Unsupervised Construction of Knowledge Graphs From Text and Code
Aug 25, 2019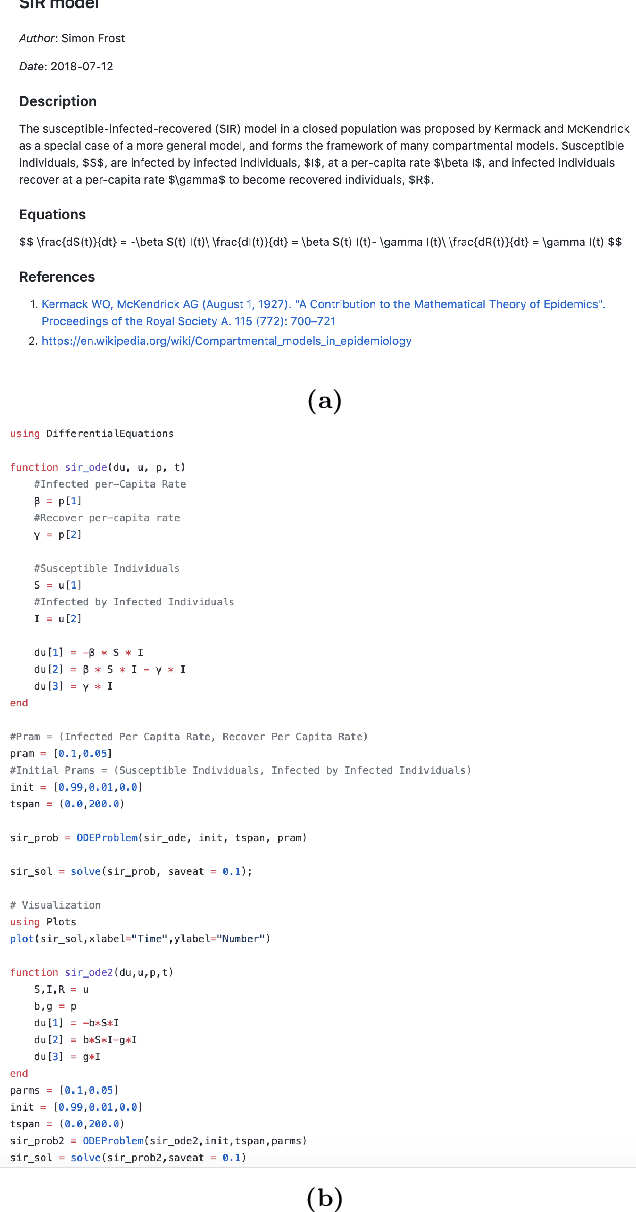
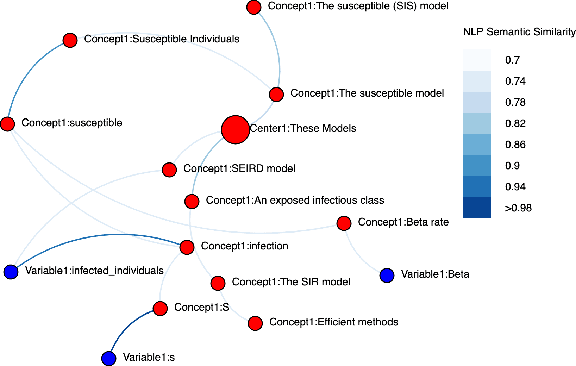
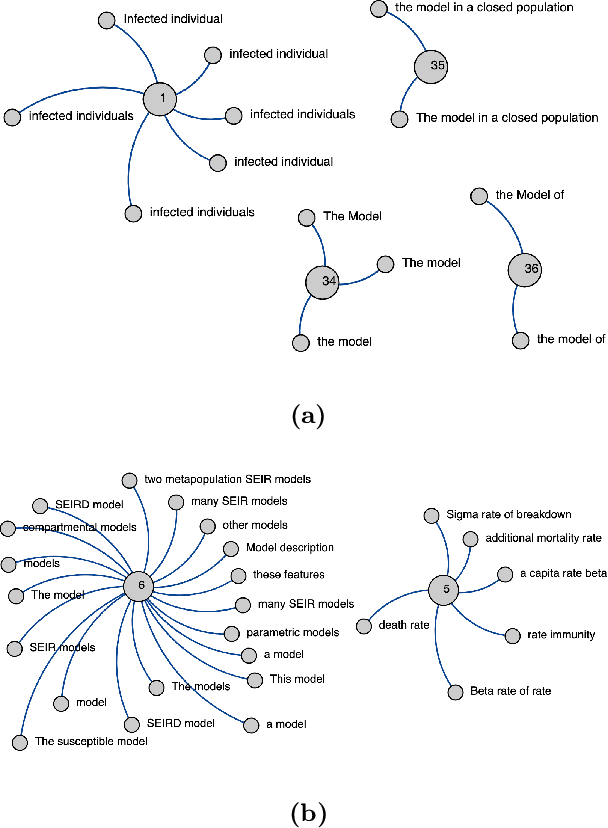
The scientific literature is a rich source of information for data mining with conceptual knowledge graphs; the open science movement has enriched this literature with complementary source code that implements scientific models. To exploit this new resource, we construct a knowledge graph using unsupervised learning methods to identify conceptual entities. We associate source code entities to these natural language concepts using word embedding and clustering techniques. Practical naming conventions for methods and functions tend to reflect the concept(s) they implement. We take advantage of this specificity by presenting a novel process for joint clustering text concepts that combines word-embeddings, nonlinear dimensionality reduction, and clustering techniques to assist in understanding, organizing, and comparing software in the open science ecosystem. With our pipeline, we aim to assist scientists in building on existing models in their discipline when making novel models for new phenomena. By combining source code and conceptual information, our knowledge graph enhances corpus-wide understanding of scientific literature.