 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVENI: Variational Encoder for Natural Illumination
Jan 20, 2026Inverse rendering is an ill-posed problem, but priors like illumination priors, can simplify it. Existing work either disregards the spherical and rotation-equivariant nature of illumination environments or does not provide a well-behaved latent space. We propose a rotation-equivariant variational autoencoder that models natural illumination on the sphere without relying on 2D projections. To preserve the SO(2)-equivariance of environment maps, we use a novel Vector Neuron Vision Transformer (VN-ViT) as encoder and a rotation-equivariant conditional neural field as decoder. In the encoder, we reduce the equivariance from SO(3) to SO(2) using a novel SO(2)-equivariant fully connected layer, an extension of Vector Neurons. We show that our SO(2)-equivariant fully connected layer outperforms standard Vector Neurons when used in our SO(2)-equivariant model. Compared to previous methods, our variational autoencoder enables smoother interpolation in latent space and offers a more well-behaved latent space.
NeuRaLaTeX: A machine learning library written in pure LaTeX
Mar 31, 2025In this paper, we introduce NeuRaLaTeX, which we believe to be the first deep learning library written entirely in LaTeX. As part of your LaTeX document you can specify the architecture of a neural network and its loss functions, define how to generate or load training data, and specify training hyperparameters and experiments. When the document is compiled, the LaTeX compiler will generate or load training data, train the network, run experiments, and generate figures. This paper generates a random 100 point spiral dataset, trains a two layer MLP on it, evaluates on a different random spiral dataset, produces plots and tables of results. The paper took 48 hours to compile and the entire source code for NeuRaLaTeX is contained within the source code of the paper. We propose two new metrics: the Written In Latex (WIL) metric measures the proportion of a machine learning library that is written in pure LaTeX, while the Source Code Of Method in Source Code of Paper (SCOMISCOP) metric measures the proportion of a paper's implementation that is contained within the paper source. We are state-of-the-art for both metrics, outperforming the ResNet and Transformer papers, as well as the PyTorch and Tensorflow libraries. Source code, documentation, videos, crypto scams and an invitation to invest in the commercialisation of NeuRaLaTeX are available at https://www.neuralatex.com
The Sky's the Limit: Re-lightable Outdoor Scenes via a Sky-pixel Constrained Illumination Prior and Outside-In Visibility
Nov 28, 2023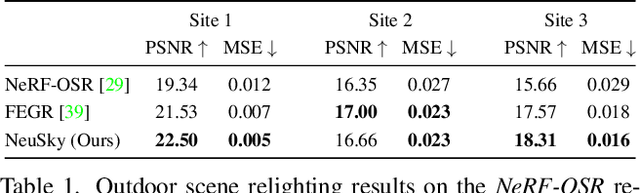
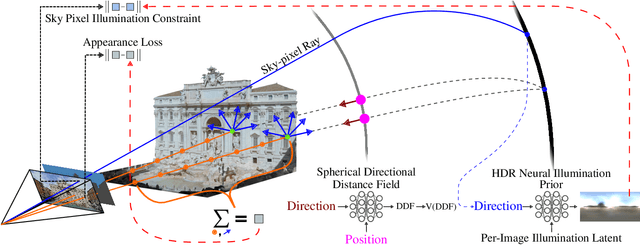
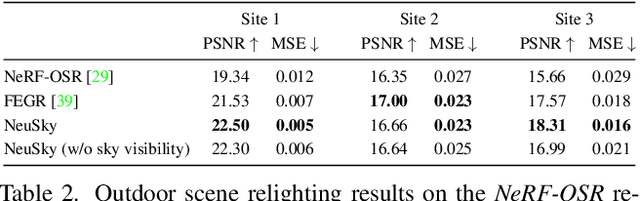
Inverse rendering of outdoor scenes from unconstrained image collections is a challenging task, particularly illumination/albedo ambiguities and occlusion of the illumination environment (shadowing) caused by geometry. However, there are many cues in an image that can aid in the disentanglement of geometry, albedo and shadows. We exploit the fact that any sky pixel provides a direct measurement of distant lighting in the corresponding direction and, via a neural illumination prior, a statistical cue as to the remaining illumination environment. We also introduce a novel `outside-in' method for computing differentiable sky visibility based on a neural directional distance function. This is efficient and can be trained in parallel with the neural scene representation, allowing gradients from appearance loss to flow from shadows to influence estimation of illumination and geometry. Our method estimates high-quality albedo, geometry, illumination and sky visibility, achieving state-of-the-art results on the NeRF-OSR relighting benchmark. Our code and models can be found https://github.com/JADGardner/neusky
RENI++ A Rotation-Equivariant, Scale-Invariant, Natural Illumination Prior
Nov 15, 2023Inverse rendering is an ill-posed problem. Previous work has sought to resolve this by focussing on priors for object or scene shape or appearance. In this work, we instead focus on a prior for natural illuminations. Current methods rely on spherical harmonic lighting or other generic representations and, at best, a simplistic prior on the parameters. This results in limitations for the inverse setting in terms of the expressivity of the illumination conditions, especially when taking specular reflections into account. We propose a conditional neural field representation based on a variational auto-decoder and a transformer decoder. We extend Vector Neurons to build equivariance directly into our architecture, and leveraging insights from depth estimation through a scale-invariant loss function, we enable the accurate representation of High Dynamic Range (HDR) images. The result is a compact, rotation-equivariant HDR neural illumination model capable of capturing complex, high-frequency features in natural environment maps. Training our model on a curated dataset of 1.6K HDR environment maps of natural scenes, we compare it against traditional representations, demonstrate its applicability for an inverse rendering task and show environment map completion from partial observations. We share our PyTorch implementation, dataset and trained models at https://github.com/JADGardner/ns_reni
Rotation-Equivariant Conditional Spherical Neural Fields for Learning a Natural Illumination Prior
Jun 10, 2022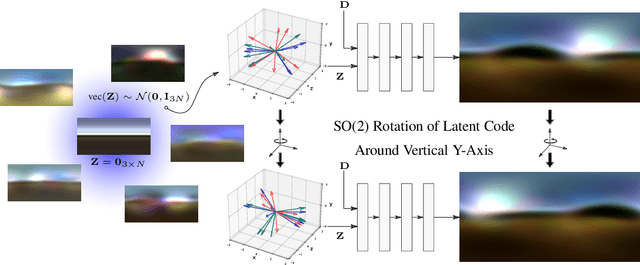
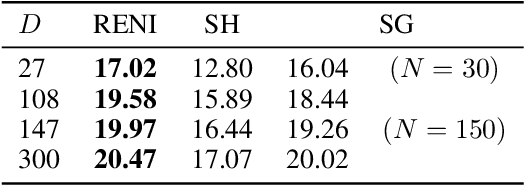
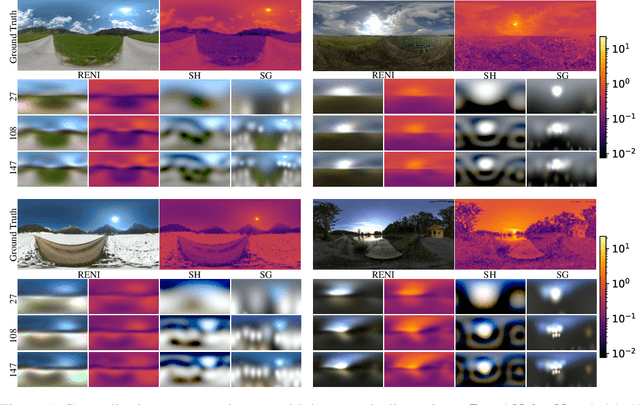

Inverse rendering is an ill-posed problem. Previous work has sought to resolve this by focussing on priors for object or scene shape or appearance. In this work, we instead focus on a prior for natural illuminations. Current methods rely on spherical harmonic lighting or other generic representations and, at best, a simplistic prior on the parameters. We propose a conditional neural field representation based on a variational auto-decoder with a SIREN network and, extending Vector Neurons, build equivariance directly into the network. Using this we develop a rotation-equivariant, high dynamic range (HDR) neural illumination model that is compact and able to express complex, high-frequency features of natural environment maps. Training our model on a curated dataset of 1.6K HDR environment maps of natural scenes, we compare it against traditional representations, demonstrate its applicability for an inverse rendering task and show environment map completion from partial observations. A PyTorch implementation, our dataset and trained models can be found at jadgardner.github.io/RENI.