 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Surfaces and Attitude Aware Planning and Behaviours for Negative Obstacle Navigation
Oct 30, 2020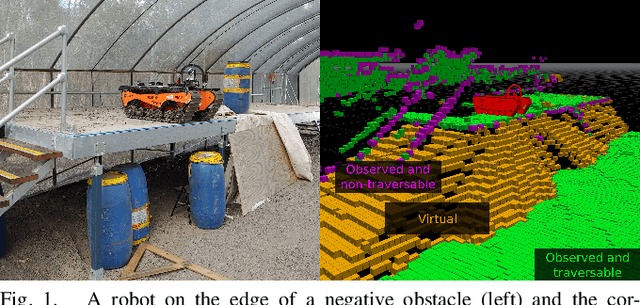

This paper presents an autonomous navigation system for ground robots traversing aggressive unstructured terrain through a cohesive arrangement of mapping, deliberative planning and reactive behaviour modules. All systems are aware of terrain slope, visibility and vehicle orientation, enabling robots to recognize, plan and react around unobserved areas and overcome negative obstacles, slopes, steps, overhangs and narrow passageways. This is the first work to explicitly couple mapping, planning and reactive components in dealing with negative obstacles. The system was deployed on three heterogeneous ground robots for the DARPA Subterranean Challenge, and we present results in Urban and Cave environments, along with simulated scenarios, that demonstrate this approach.