 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOut of the Box, into the Clinic? Evaluating State-of-the-Art ASR for Clinical Applications for Older Adults
Aug 12, 2025



Voice-controlled interfaces can support older adults in clinical contexts, with chatbots being a prime example, but reliable Automatic Speech Recognition (ASR) for underrepresented groups remains a bottleneck. This study evaluates state-of-the-art ASR models on language use of older Dutch adults, who interacted with the Welzijn.AI chatbot designed for geriatric contexts. We benchmark generic multilingual ASR models, and models fine-tuned for Dutch spoken by older adults, while also considering processing speed. Our results show that generic multilingual models outperform fine-tuned models, which suggests recent ASR models can generalise well out of the box to realistic datasets. Furthermore, our results suggest that truncating existing architectures is helpful in balancing the accuracy-speed trade-off, though we also identify some cases with high WER due to hallucinations.
A Gaussian Process Model for Opponent Prediction in Autonomous Racing
Apr 26, 2022
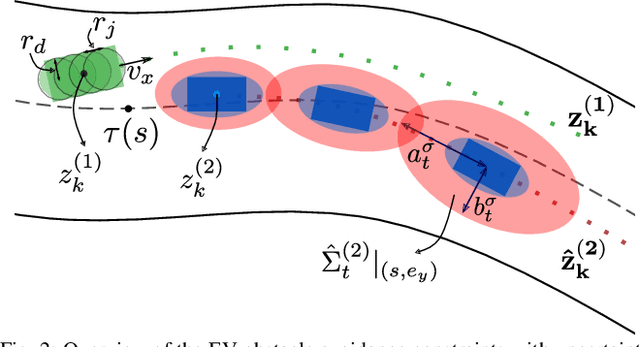

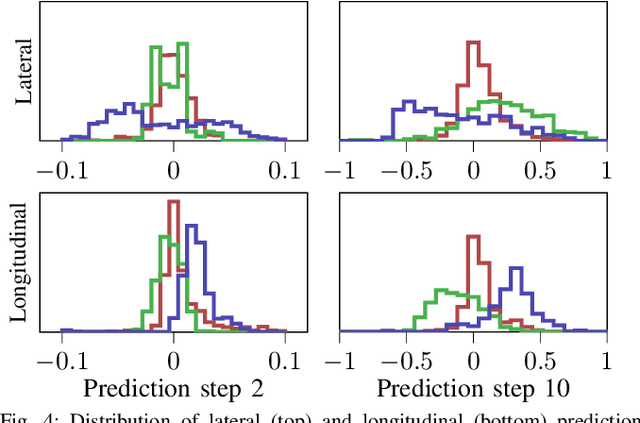
In head-to-head racing, performing tightly constrained, but highly rewarding maneuvers, such as overtaking, require an accurate model of interactive behavior of the opposing target vehicle (TV). However, such information is not typically made available in competitive scenarios, we therefore propose to construct a prediction and uncertainty model given data of the TV from previous races. In particular, a one-step Gaussian Process (GP) model is trained on closed-loop interaction data to learn the behavior of a TV driven by an unknown policy. Predictions of the nominal trajectory and associated uncertainty are rolled out via a sampling-based approach and are used in a model predictive control (MPC) policy for the ego vehicle in order to intelligently trade-off between safety and performance when attempting overtaking maneuvers against a TV. We demonstrate the GP-based predictor in closed loop with the MPC policy in simulation races and compare its performance against several predictors from literature. In a Monte Carlo study, we observe that the GP-based predictor achieves similar win rates while maintaining safety in up to 3x more races. We finally demonstrate the prediction and control framework in real-time on hardware experiments.