 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Distributed Informative Planning for Environmental Learning with Multi-Robot Systems
Dec 29, 2021
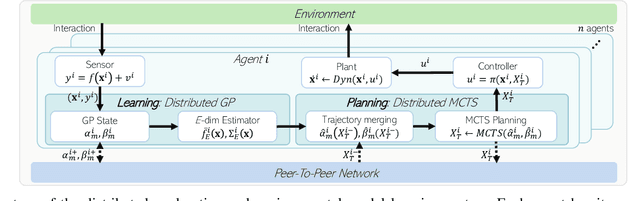
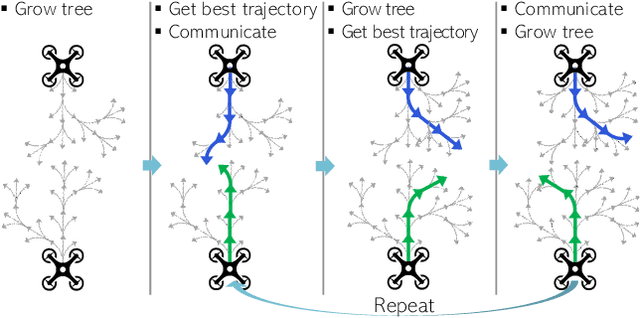
This paper proposes a cooperative environmental learning algorithm working in a fully distributed manner. A multi-robot system is more effective for exploration tasks than a single robot, but it involves the following challenges: 1) online distributed learning of environmental map using multiple robots; 2) generation of safe and efficient exploration path based on the learned map; and 3) maintenance of the scalability with respect to the number of robots. To this end, we divide the entire process into two stages of environmental learning and path planning. Distributed algorithms are applied in each stage and combined through communication between adjacent robots. The environmental learning algorithm uses a distributed Gaussian process, and the path planning algorithm uses a distributed Monte Carlo tree search. As a result, we build a scalable system without the constraint on the number of robots. Simulation results demonstrate the performance and scalability of the proposed system. Moreover, a real-world-dataset-based simulation validates the utility of our algorithm in a more realistic scenario.