 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Not to Reconstruct Anomalies
Oct 24, 2021
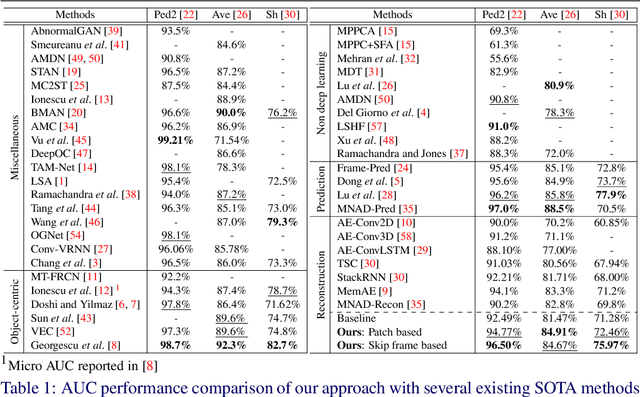
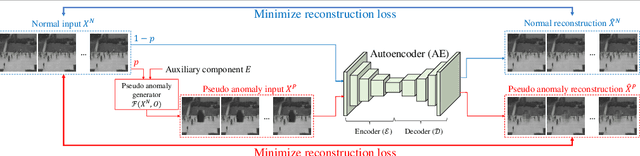

Video anomaly detection is often seen as one-class classification (OCC) problem due to the limited availability of anomaly examples. Typically, to tackle this problem, an autoencoder (AE) is trained to reconstruct the input with training set consisting only of normal data. At test time, the AE is then expected to well reconstruct the normal data while poorly reconstructing the anomalous data. However, several studies have shown that, even with only normal data training, AEs can often start reconstructing anomalies as well which depletes the anomaly detection performance. To mitigate this problem, we propose a novel methodology to train AEs with the objective of reconstructing only normal data, regardless of the input (i.e., normal or abnormal). Since no real anomalies are available in the OCC settings, the training is assisted by pseudo anomalies that are generated by manipulating normal data to simulate the out-of-normal-data distribution. We additionally propose two ways to generate pseudo anomalies: patch and skip frame based. Extensive experiments on three challenging video anomaly datasets demonstrate the effectiveness of our method in improving conventional AEs, achieving state-of-the-art performance.
Zero-Shot Calibration of Fisheye Cameras
Nov 30, 2020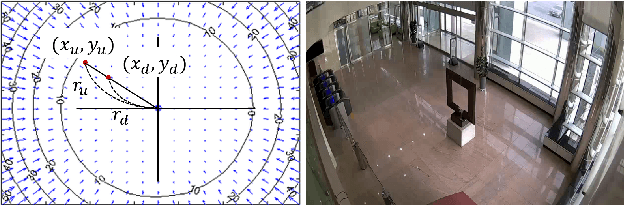
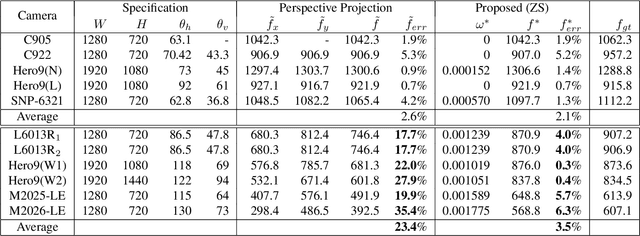
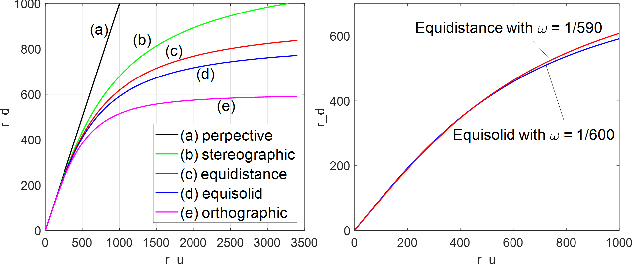
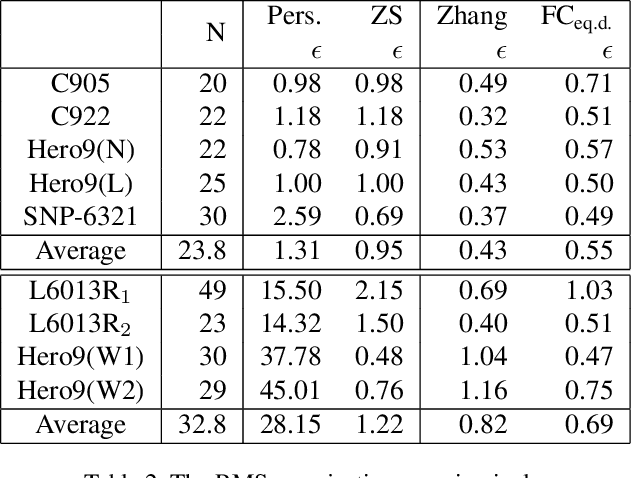
In this paper, we present a novel zero-shot camera calibration method that estimates camera parameters with no calibration image. It is common sense that we need at least one or more pattern images for camera calibration. However, the proposed method estimates camera parameters from the horizontal and vertical field of view information of the camera without any image acquisition. The proposed method is particularly useful for wide-angle or fisheye cameras that have large image distortion. Image distortion is modeled in the way fisheye lenses are designed and estimated based on the square pixel assumption of the image sensors. The calibration accuracy of the proposed method is evaluated on eight different commercial cameras qualitatively and quantitatively, and compared with conventional calibration methods. The experimental results show that the calibration accuracy of the zero-shot method is comparable to conventional full calibration results. The method can be used as a practical alternative in real applications where individual calibration is difficult or impractical, and in most field applications where calibration accuracy is less critical. Moreover, the estimated camera parameters by the method can also be used to provide proper initialization of any existing calibration methods, making them to converge more stably and avoid local minima.
Concurrent Tracking of Inliers and Outliers
Sep 13, 2014



In object tracking, outlier is one of primary factors which degrade performance of image-based tracking algorithms. In this respect, therefore, most of the existing methods simply discard detected outliers and pay little or no attention to employing them as an important source of information for motion estimation. We consider outliers as important as inliers for object tracking and propose a motion estimation algorithm based on concurrent tracking of inliers and outliers. Our tracker makes use of pyramidal implementation of the Lucas-Kanade tracker to estimate motion flows of inliers and outliers and final target motion is estimated robustly based on both of these information. Experimental results from challenging benchmark video sequences confirm enhanced tracking performance, showing highly stable target tracking under severe occlusion compared with state-of-the-art algorithms. The proposed algorithm runs at more than 100 frames per second even without using a hardware accelerator, which makes the proposed method more practical and portable.