 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHardware-In-the-Loop for Connected Automated Vehicles Testing in Real Traffic
Jul 21, 2019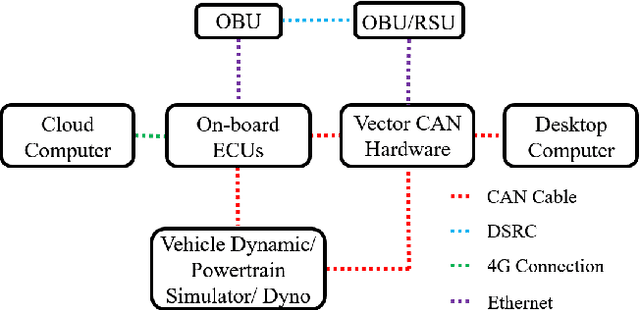

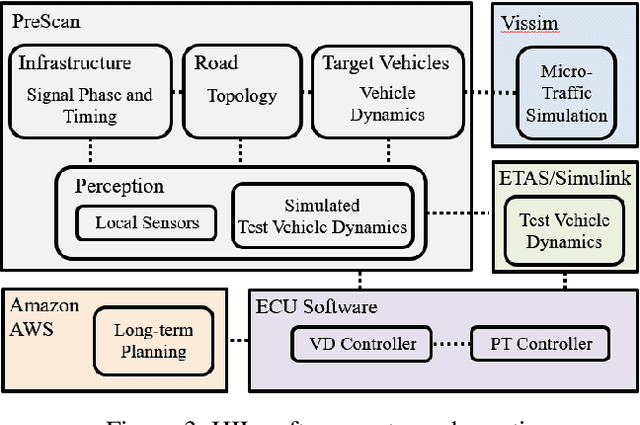
We present a hardware-in-the-loop (HIL) simulation setup for repeatable testing of Connected Automated Vehicles (CAVs) in dynamic, real-world scenarios. Our goal is to test control and planning algorithms and their distributed implementation on the vehicle hardware and, possibly, in the cloud. The HIL setup combines PreScan for perception sensors, road topography, and signalized intersections; Vissim for traffic micro-simulation; ETAS DESK-LABCAR/a dynamometer for vehicle and powertrain dynamics; and on-board electronic control units for CAV real time control. Models of traffic and signalized intersections are driven by real-world measurements. To demonstrate this HIL simulation setup, we test a Model Predictive Control approach for maximizing energy efficiency of CAVs in urban environments.
Safe Adaptive Cruise Control with Road Grade Preview and V2V Communication
Oct 21, 2018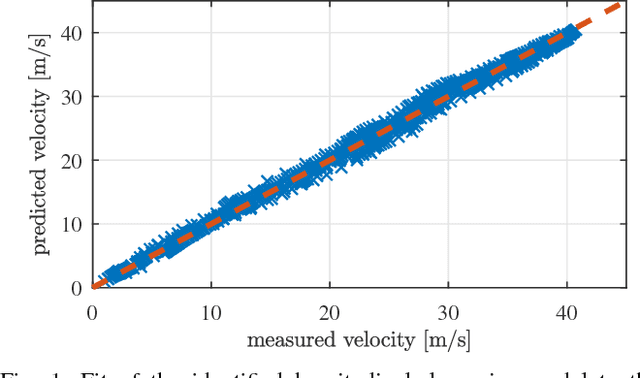



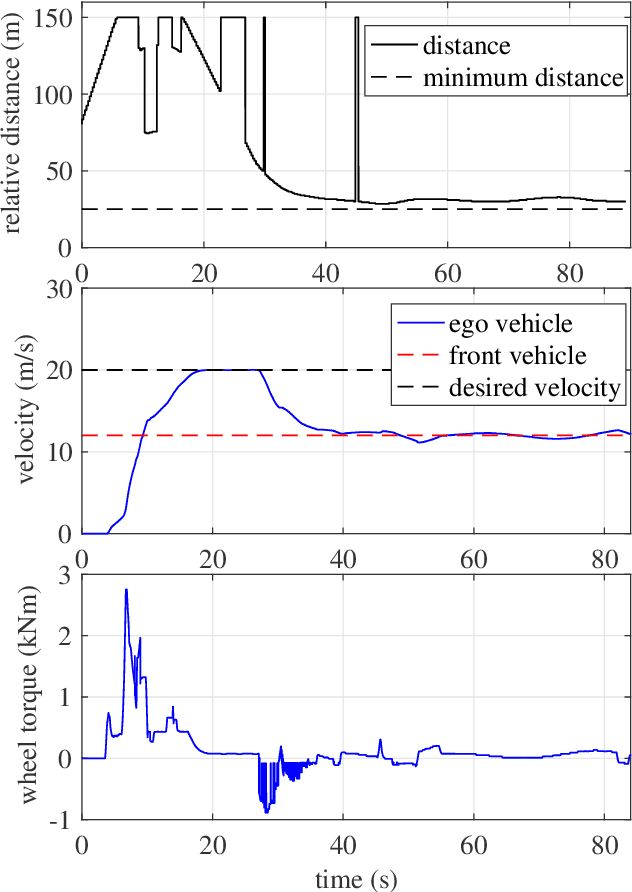
We present the design of a safe Adaptive Cruise Control (ACC) which uses road grade and lead vehicle motion preview. The ACC controller is designed by using a Model Predictive Control (MPC) framework to optimize comfort, safety, energy-efficiency and speed tracking accuracy. Safety is achieved by computing a robust invariant terminal set. The paper presents a novel approach to compute such set which is less conservative than existing methods. The proposed controller ensures safe inter-vehicle spacing at all times despite changes in the road grade and uncertainty in the predicted motion of the lead vehicle. Simulation results compare the proposed controller with a controller that does not incorporate prior grade knowledge on two scenarios including car-following and autonomous intersection crossing. The results demonstrate the effectiveness of the proposed control algorithm.
Vehicle Localization and Control on Roads with Prior Grade Map
Sep 11, 2018
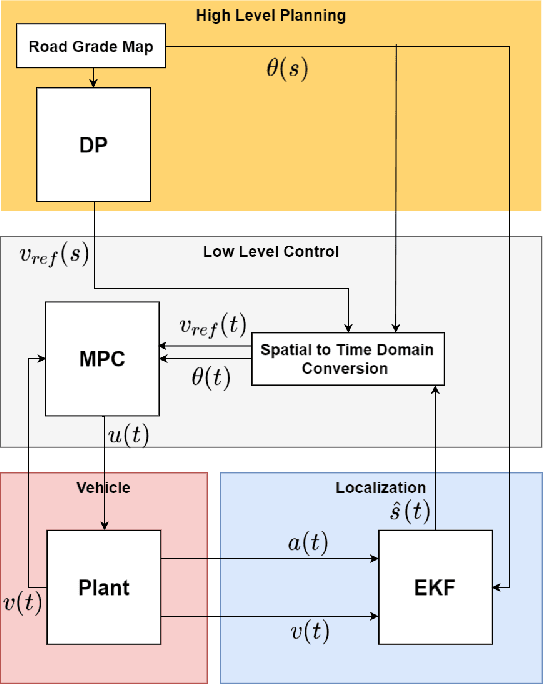
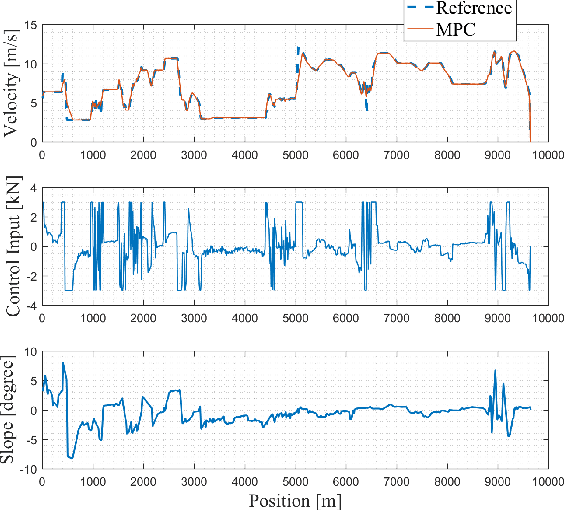
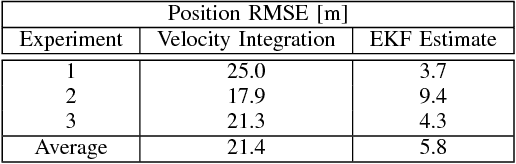
We propose a map-aided vehicle localization method for GPS-denied environments. This approach exploits prior knowledge of the road grade map and vehicle on-board sensor measurements to accurately estimate the longitudinal position of the vehicle. Real-time localization is crucial to systems that utilize position-dependent information for planning and control. We validate the effectiveness of the localization method on a hierarchical control system. The higher level planner optimizes the vehicle velocity to minimize the energy consumption for a given route by employing traffic condition and road grade data. The lower level is a cruise control system that tracks the position-dependent optimal reference velocity. Performance of the proposed localization algorithm is evaluated using both simulations and experiments.